Overview
The Tough Stump Rodeo is an outdoor edge technology demonstration set in rural Montana.
Selected companies collaborate to integrate their capabilities with the ATAK common-operating-picture to complete communications challenges.
CloudRF participated for the first time as a key enabler on the most challenging lane, the sub-terranean, which required participants to communicate and operate within an underground mine set in a steep ravine located 50km from the HQ in mountainous terrain.
With accurate planning, we quickly built a large radio network with less nodes and greater reliability than could be achieved with basic LOS tools.
Data Preparation
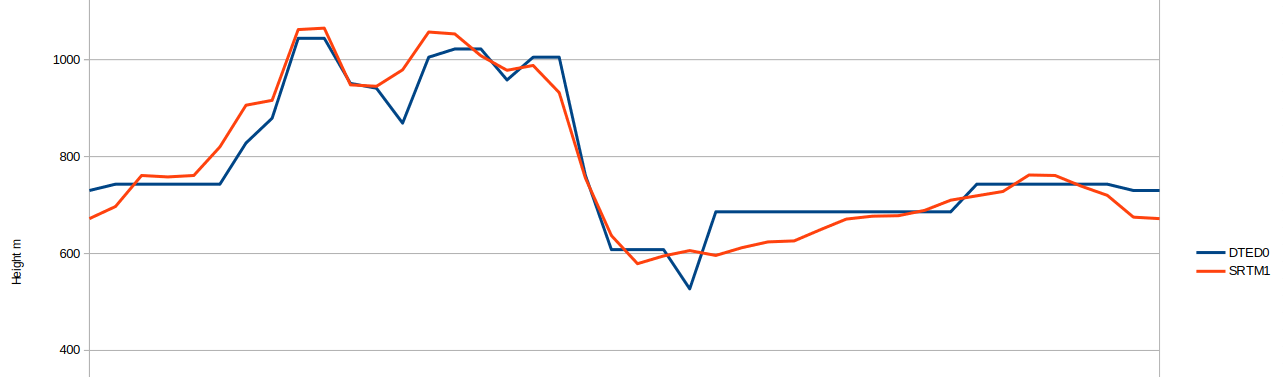
Our preparation started early as we needed to acquire high resolution data for the area to ensure accuracy. Prior to the event our data resolution in Montana was only 30m. We sourced 2m accuracy LiDAR from the USGS for the Ruby valley which we enhanced with 2m resolution tree canopy data from Meta.
Based on feedback from previous years about trees around the mine, we knew accurate tree data would be essential.
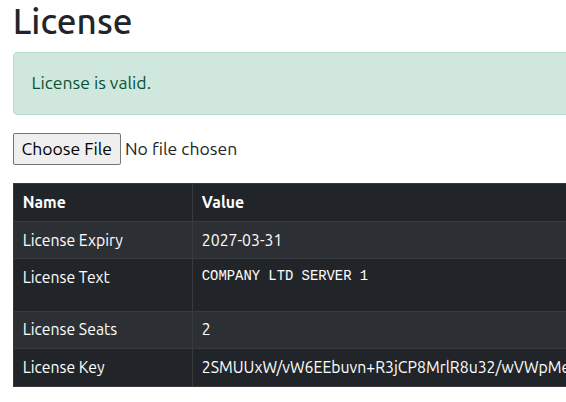
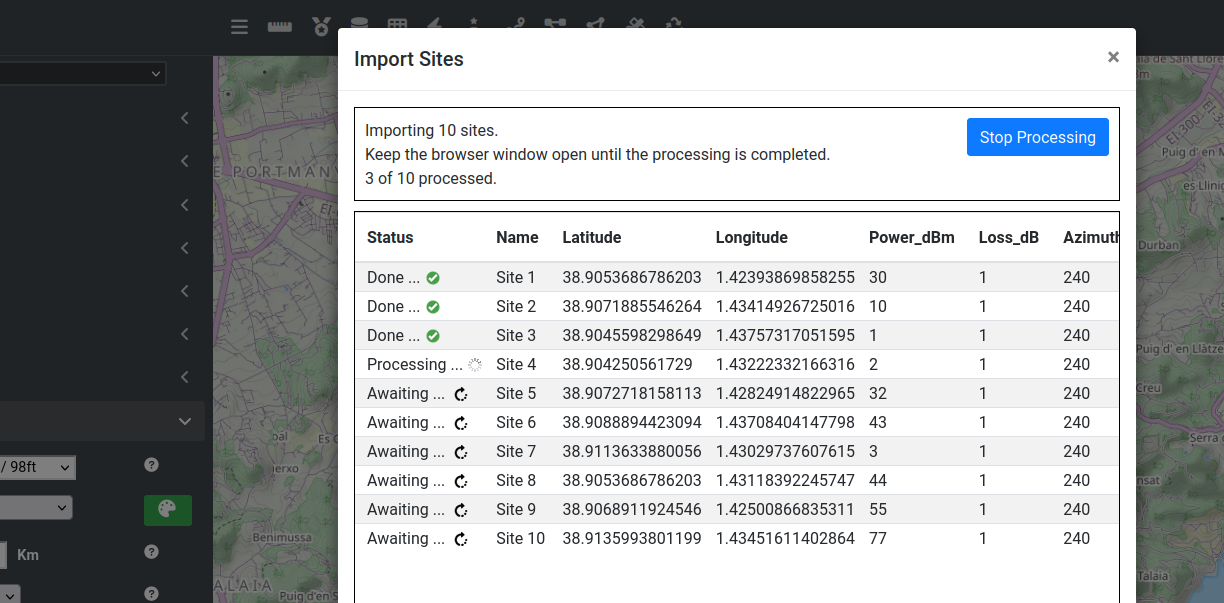
The data was loaded to the public system, CloudRF, weeks prior to the event and side-loaded to our offline SOOTHSAYER servers as GeoTIFF files within a data package.
Equipment
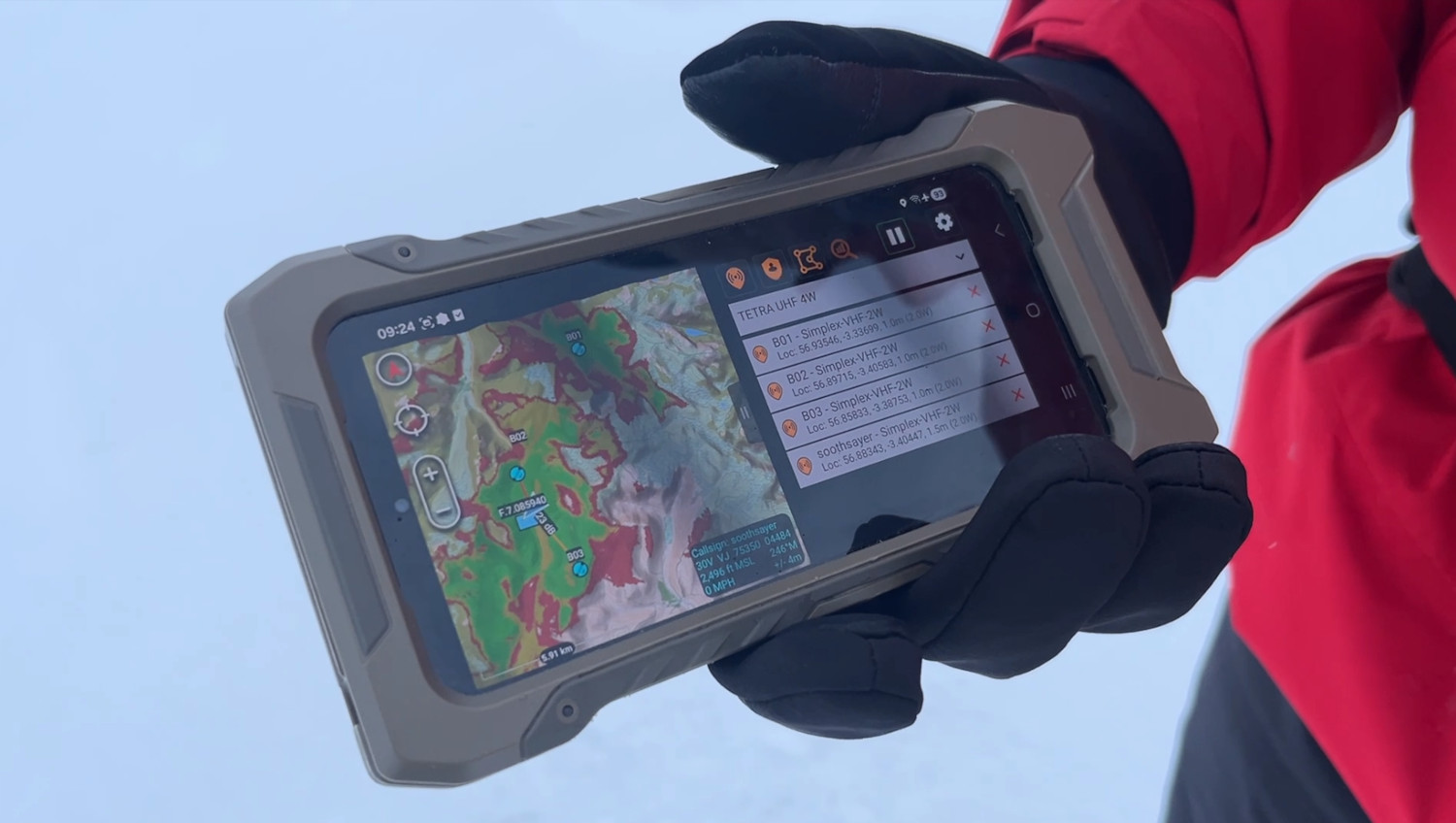
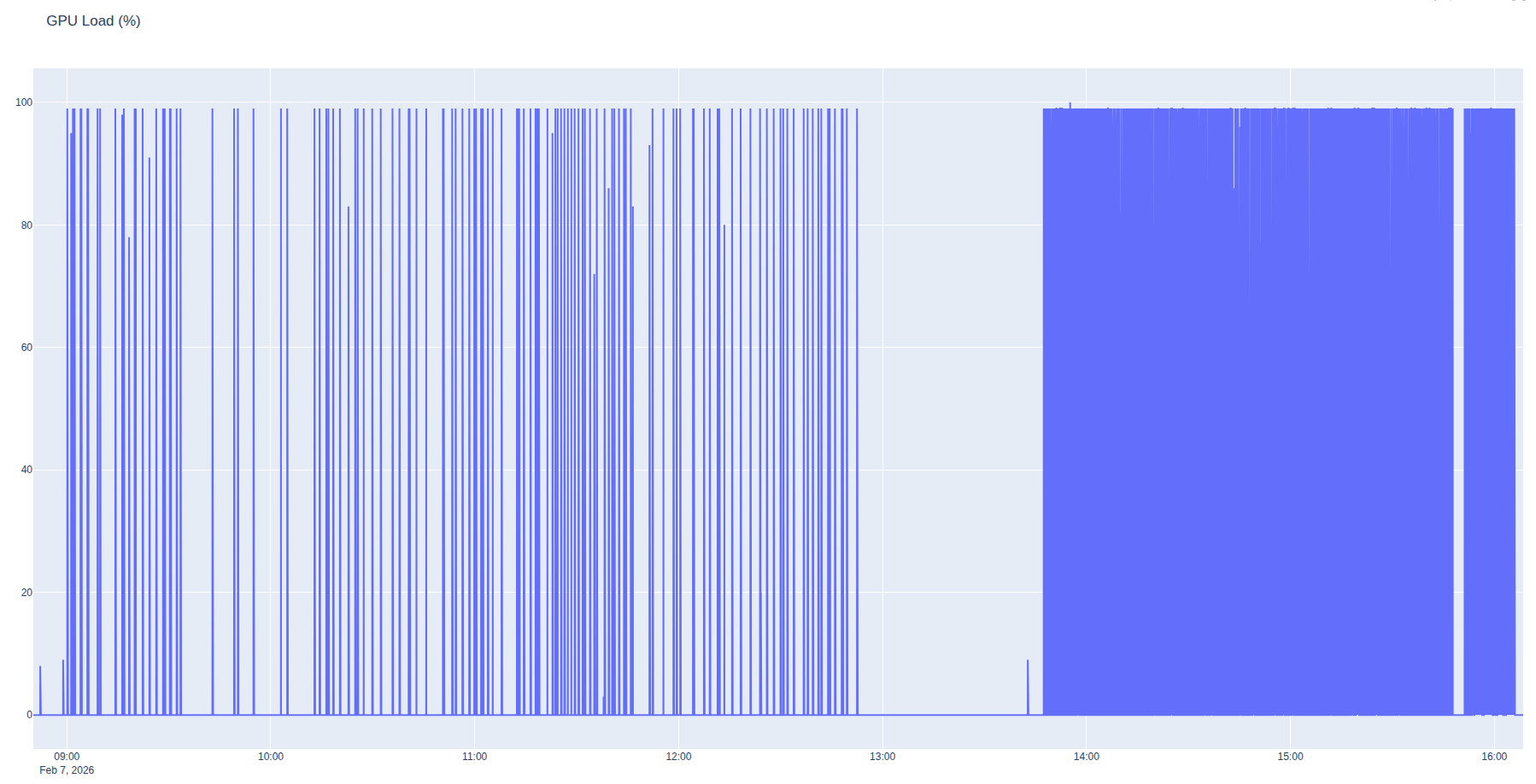
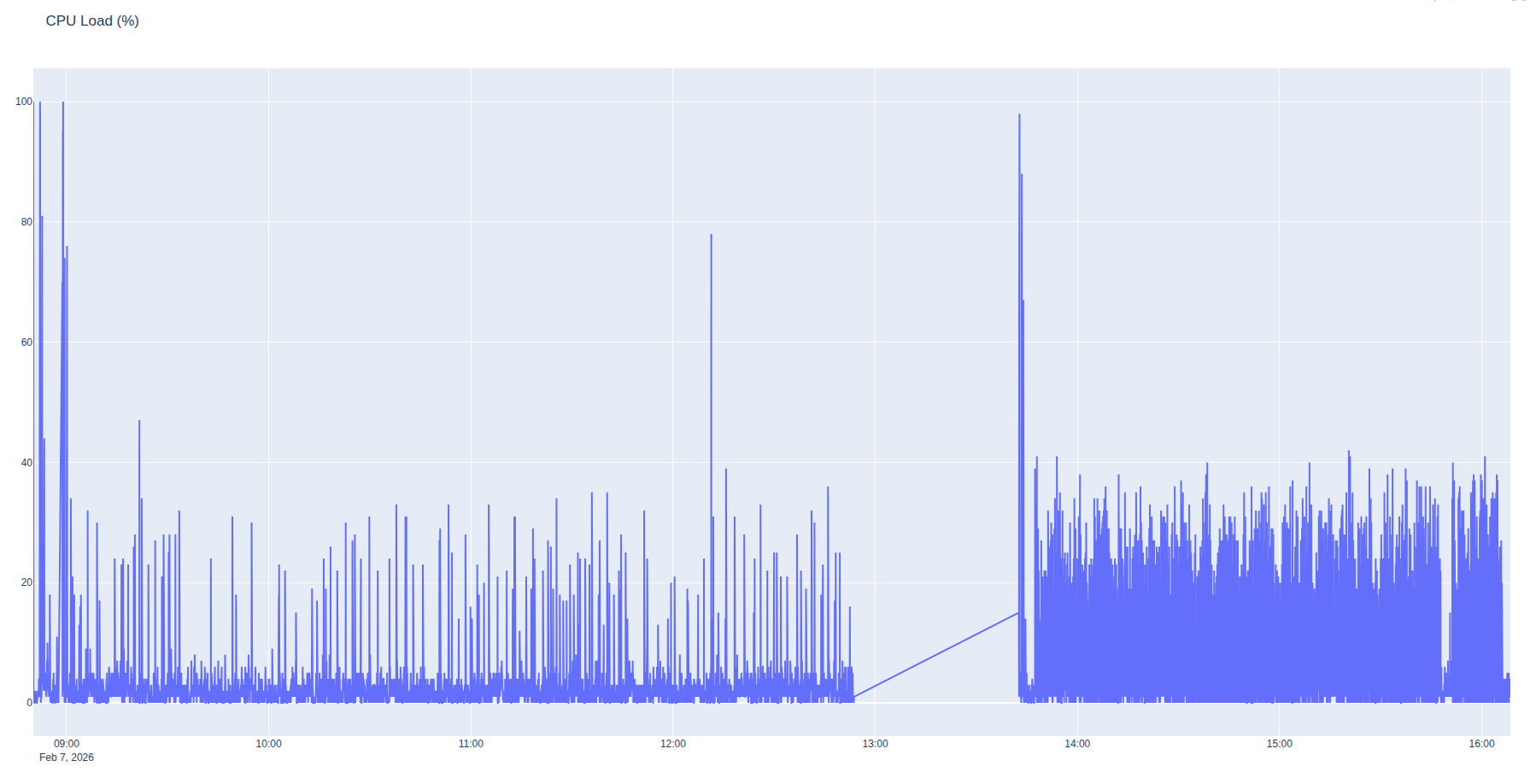
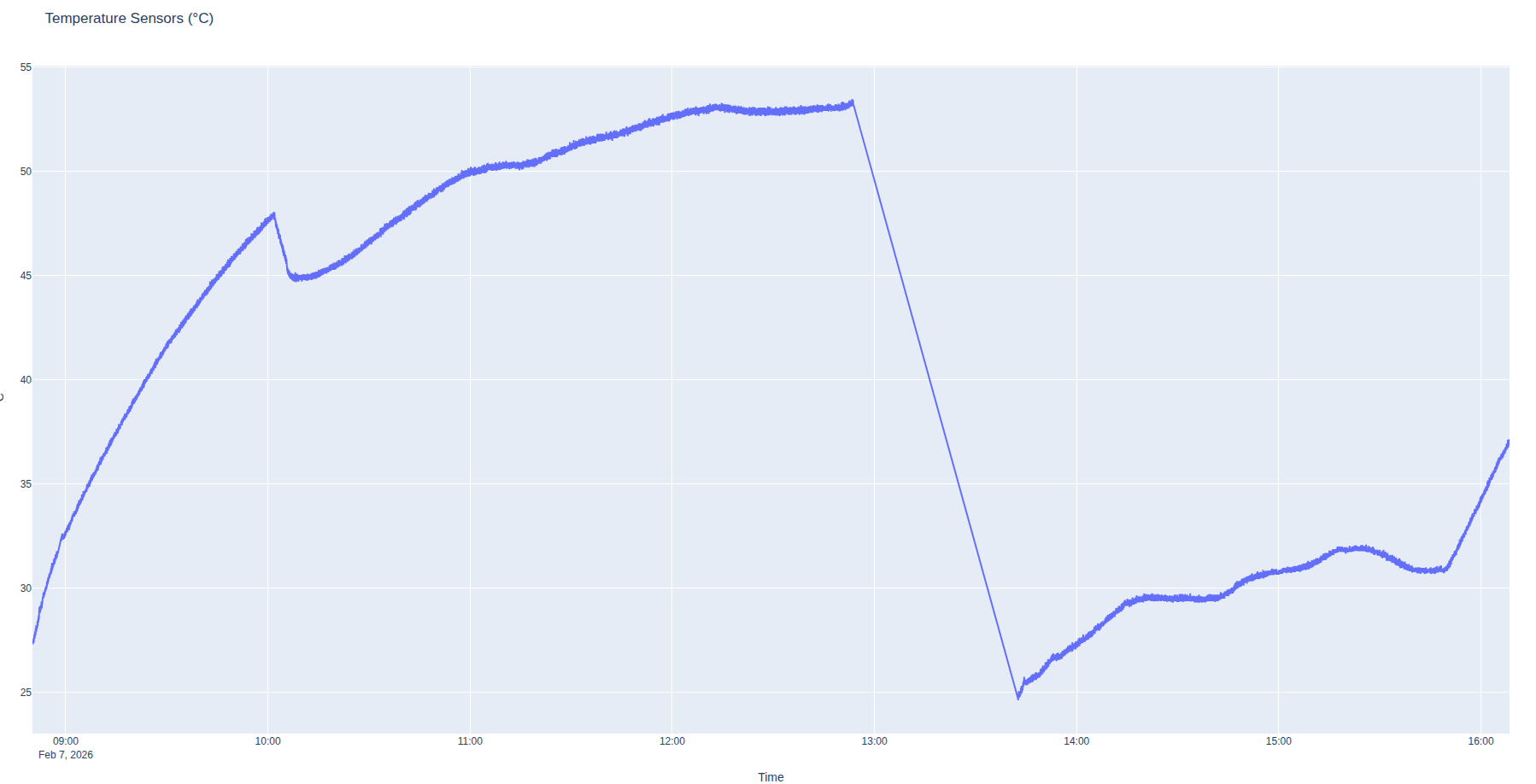
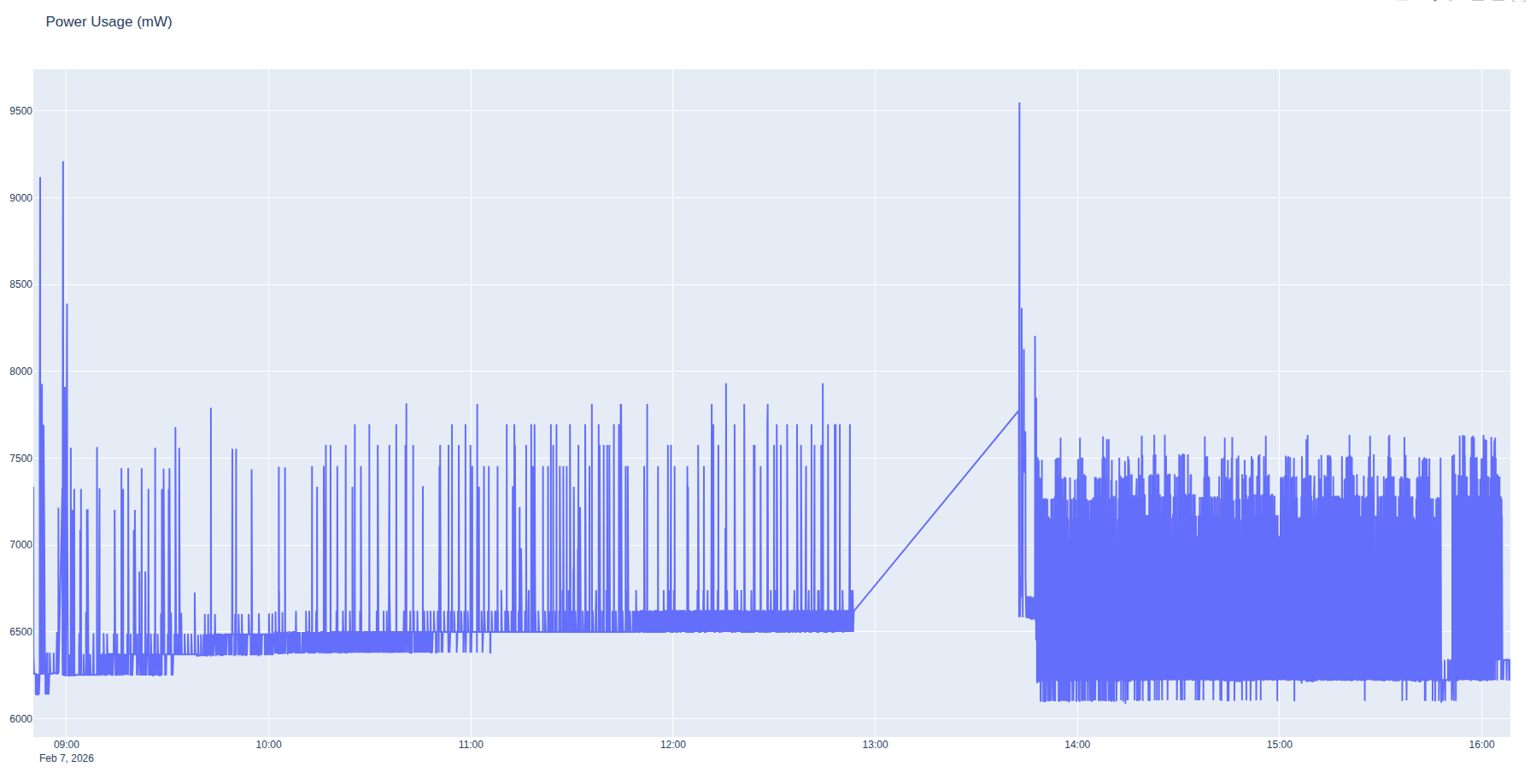
We deployed with three offline SOOTHSAYER servers of varying size with several phones and tablets as clients:
- A standard HP Z-Book laptop running Windows/Podman (RTX4070 GPU capable of 15.6 TFLOPS)
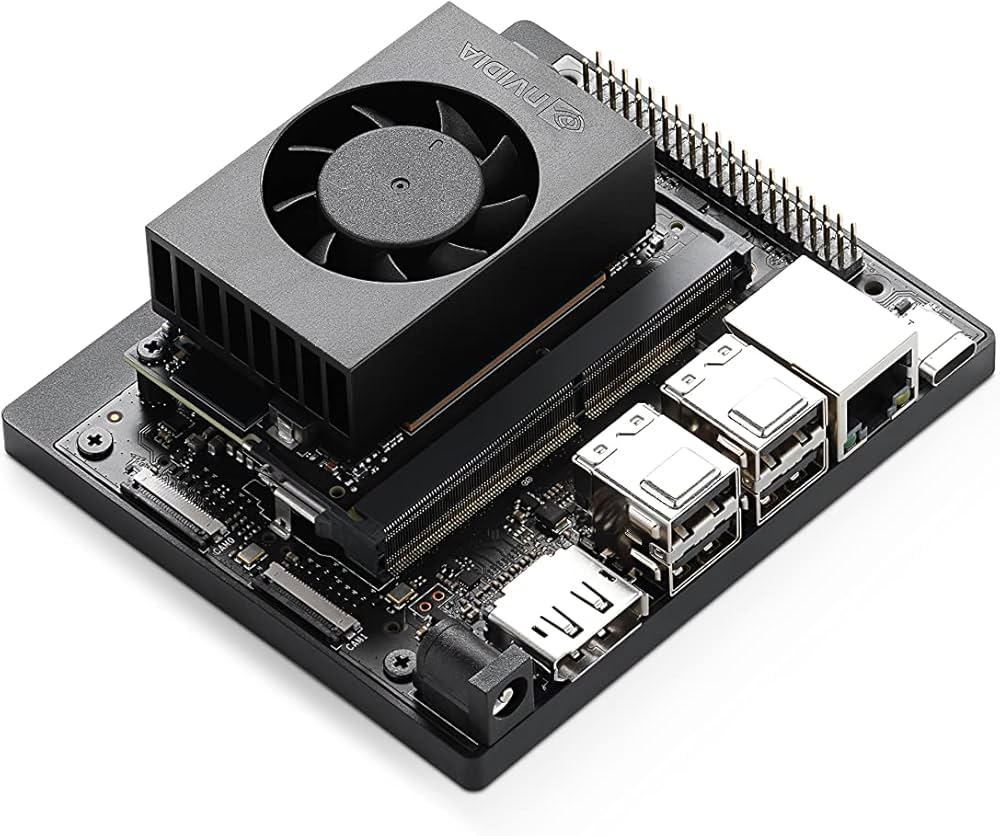
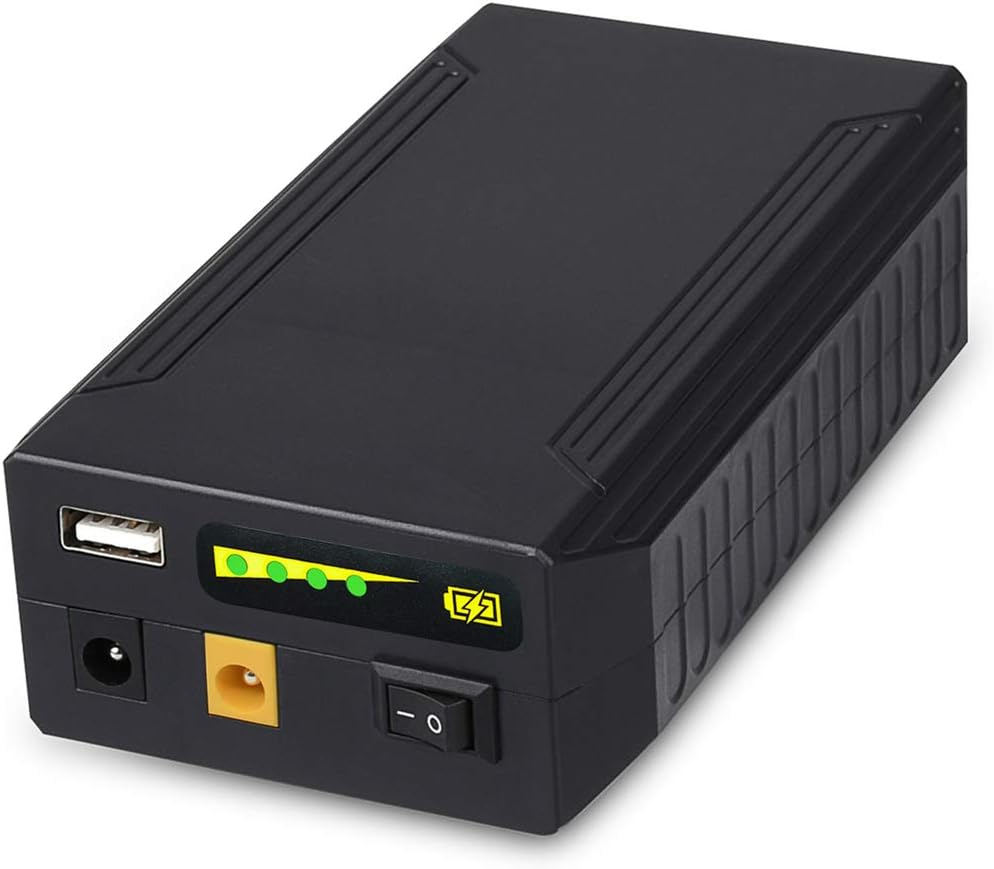
- A Carnegie Robotics CardShark computer running Ubuntu/Docker powered by a portable USB-C power bank (Jetson Orin NX capable of 3.7 TFLOPS)
- A Solace Communications Global Edge computer running Ubuntu/Docker powered by a larger USB-C power bank (Jetson Orin NX capable of 3.7 TFLOPS)
Additionally, The Global Edge computer was prepared with our Trellisware API script which interfaces directly with a donor radio to model live network coverage.
Site survey, Sunday
As we were headed to a new area, we were keen to know as much as possible about the terrain which for communications means noise as much as topography.
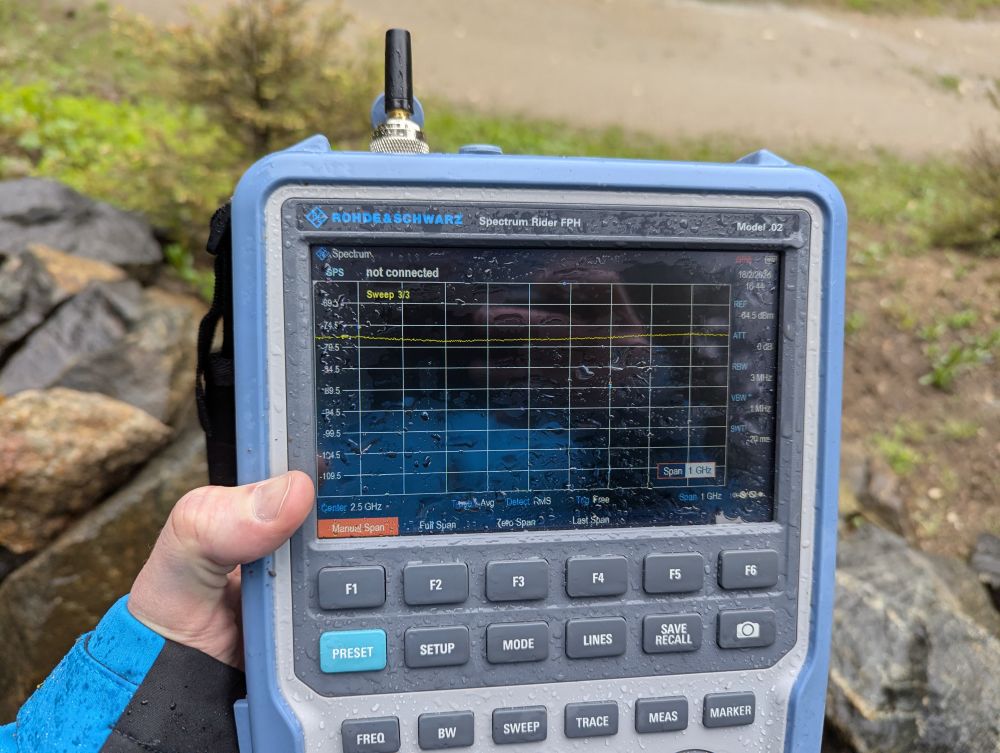
We took a spectrum analyser up to the mine site on a wet Sunday to check out the noise in the L and S bands and after a long insertion hike due to a closed seasonal access road we were satisfied to find there was no RF noise there.
The nearest noise source was a cell tower up the Ruby valley below which due its location was not able to serve the area of interest. We were therefore able to use the Johnson Nyquist formula with high accuracy to predict the expected noise floor for a given bandwidth.
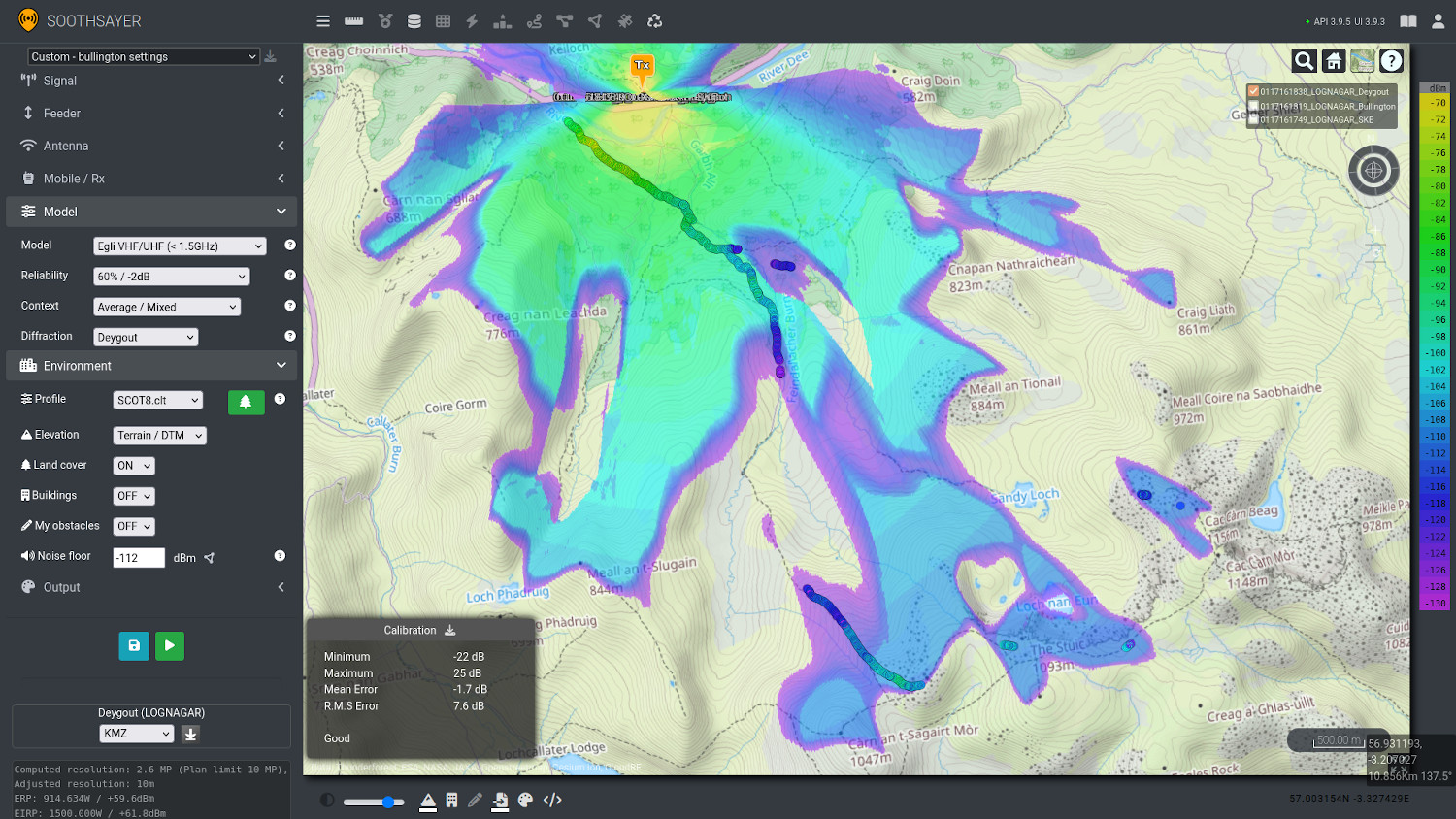
We modelled the Mine location with modest system profiles (low height/power) to see if we could identify any local relay opportunities. The mine was tricky as it was in a steep forest ravine so we stood at the entrance and observed where it could reach. This low tech study confirmed our modelling which highlighted a hill ~750m due west which just overlooked the mine and had excellent views across the Ruby valley to the south.


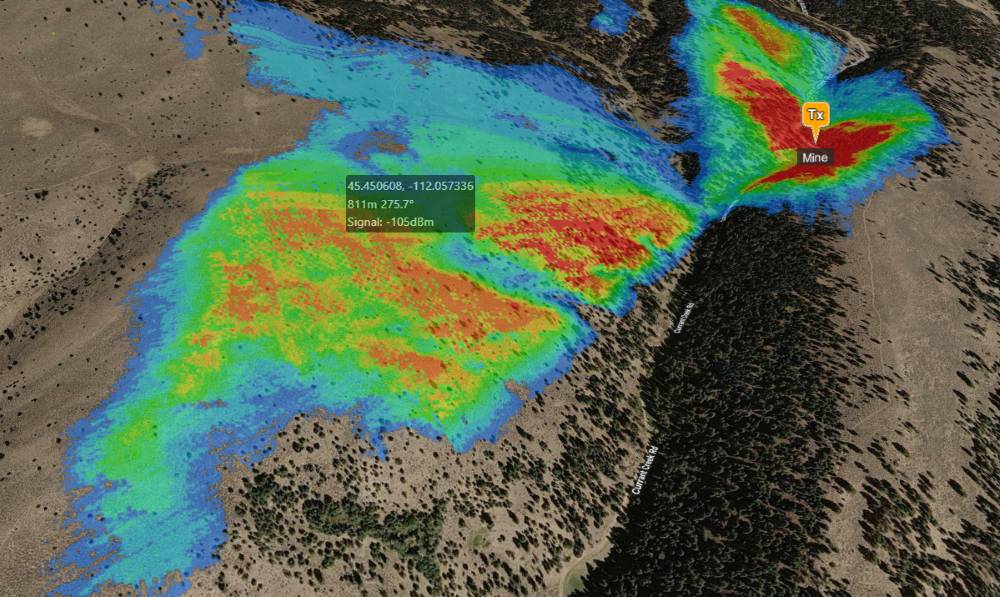
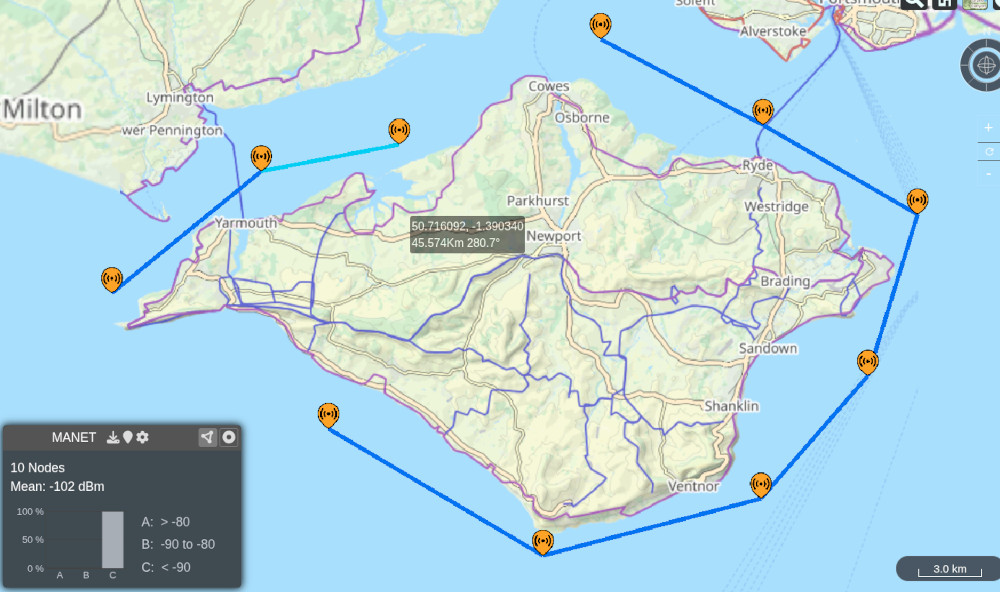
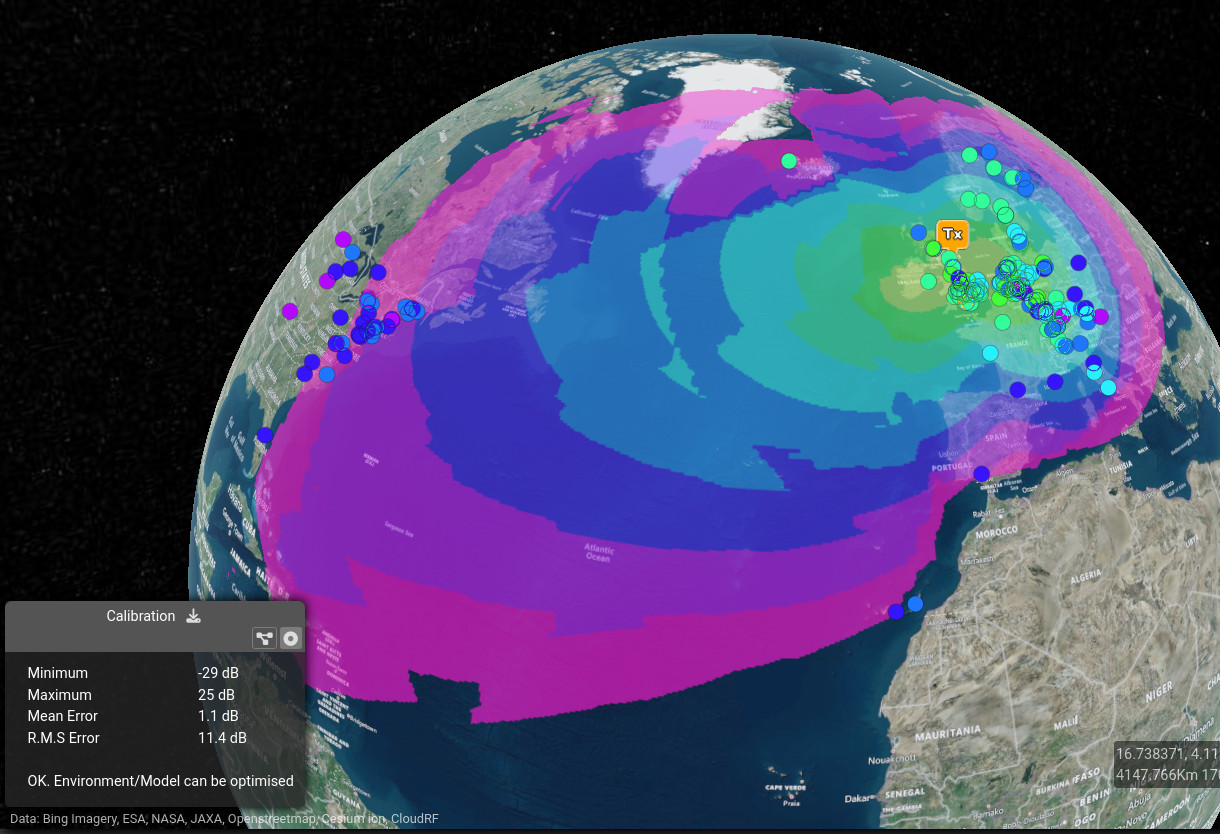
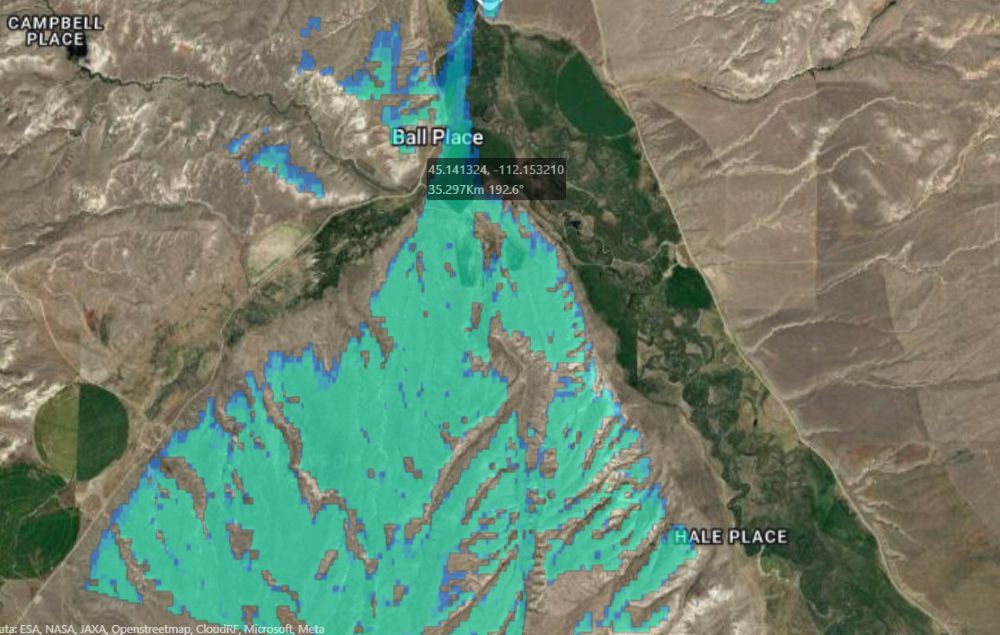
Using a mean site upon the hill within the painted coverage area we ran a second simulation with an extreme 40km radius to see where this could hit. We were pleased to see coverage on an embankment 35km down the ruby valley which was useful as the valley’s curved shape meant a relay would be required.
Next, we ran a simulation on the distant HQ location which revealed an area of mutual coverage. A plan was forming…
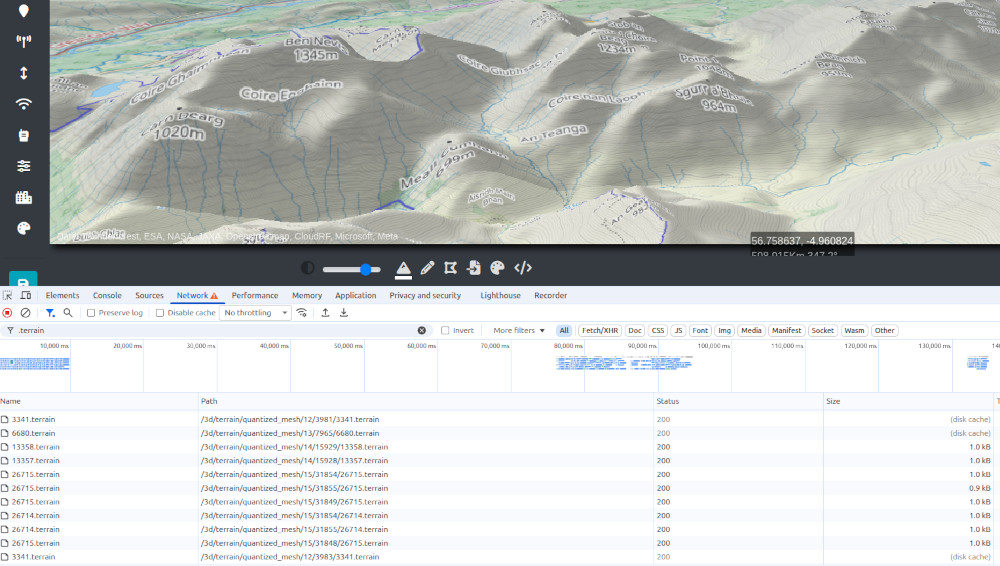
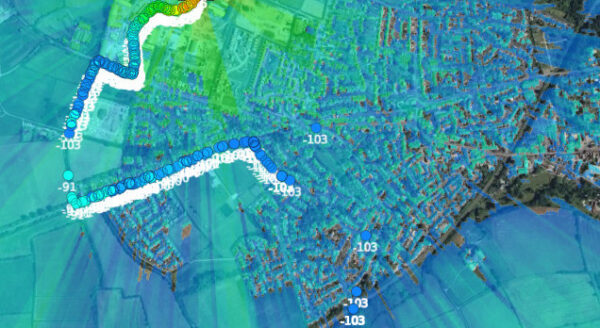
When running long range heatmaps, the resolution becomes diluted. This is necessary to remain within processing limits as whilst 16 million point calculations are available due to the large GPUS we have on CloudRF, they are impractical for a battery powered Jetson which must share its output over a radio network on ATAK. We also observed notable latency with fetching large KMZ files via the radio’s onboard Wi-Fi as it’s running an older 802.11 standard.
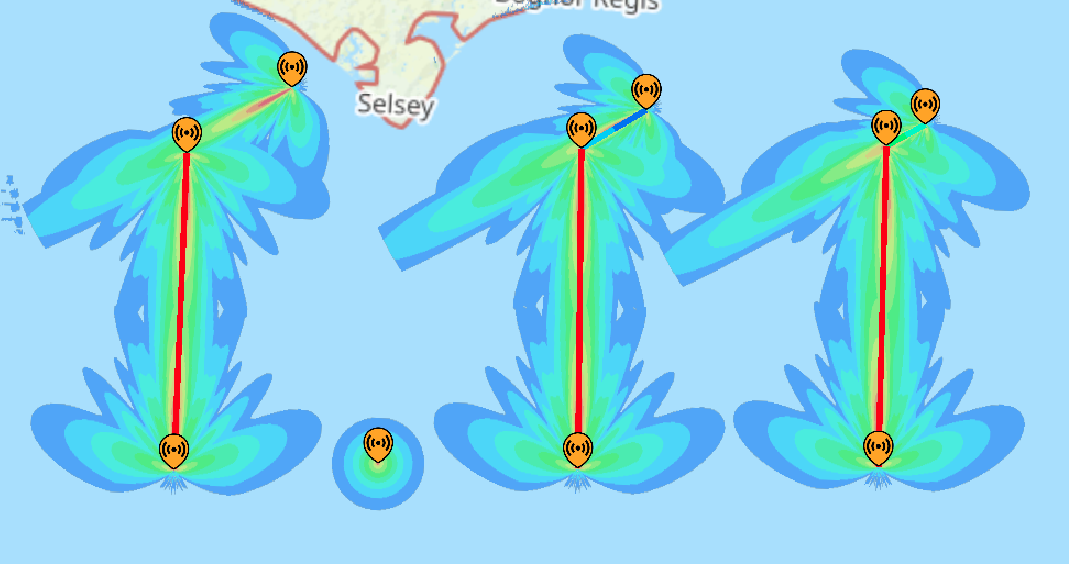
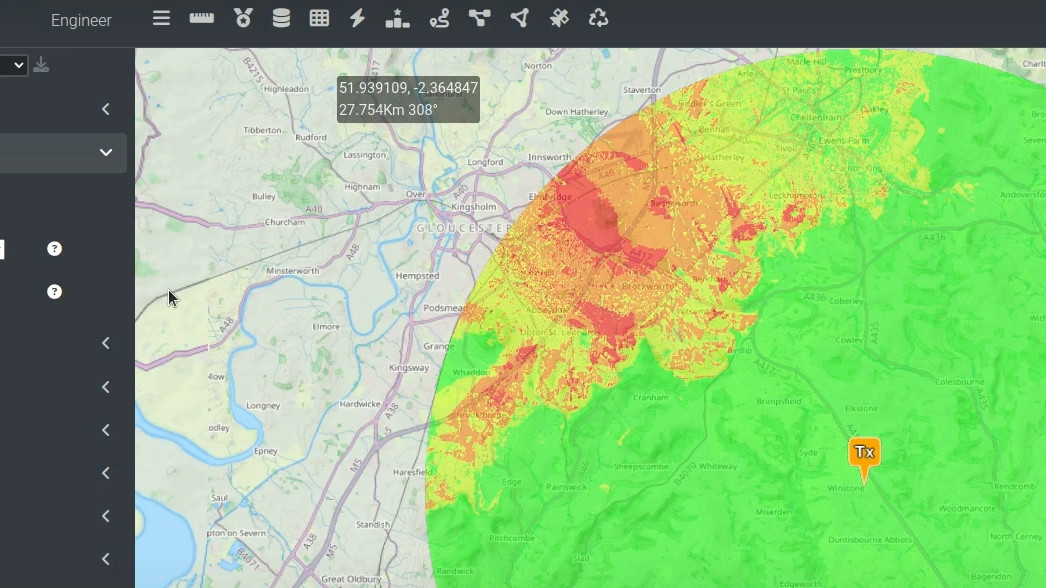
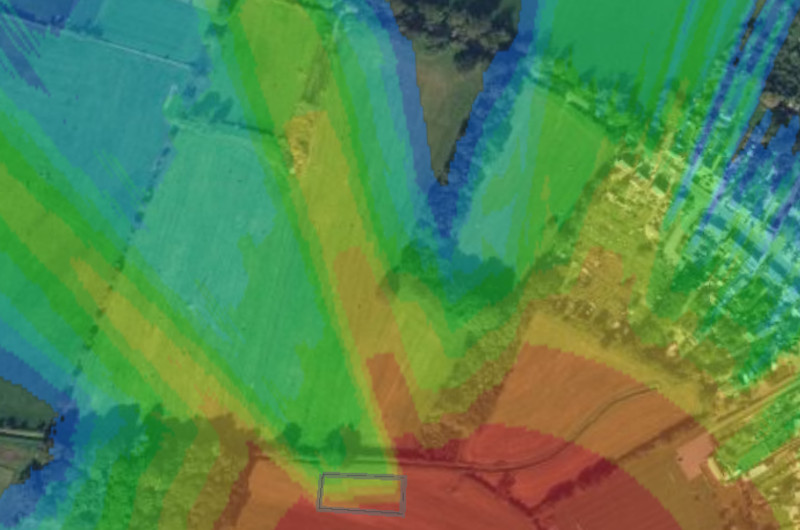
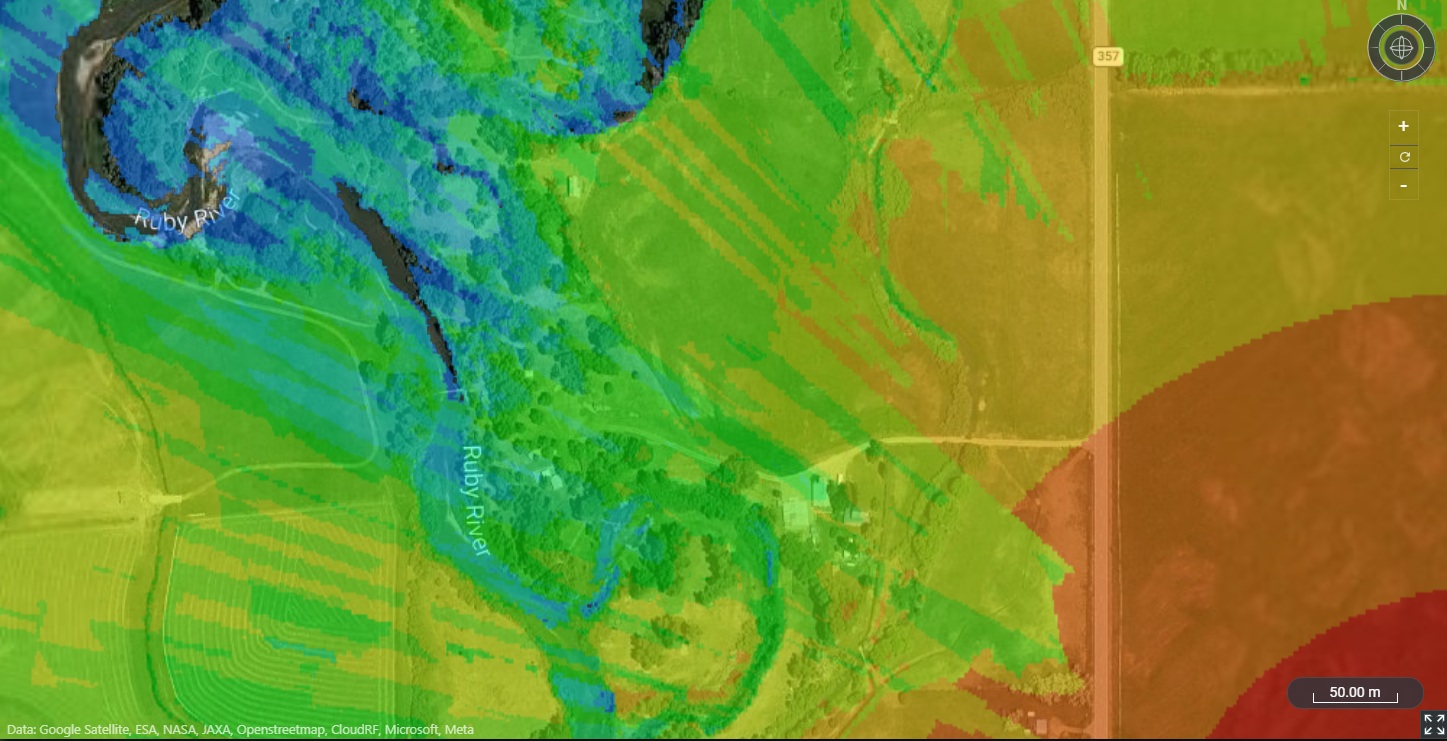
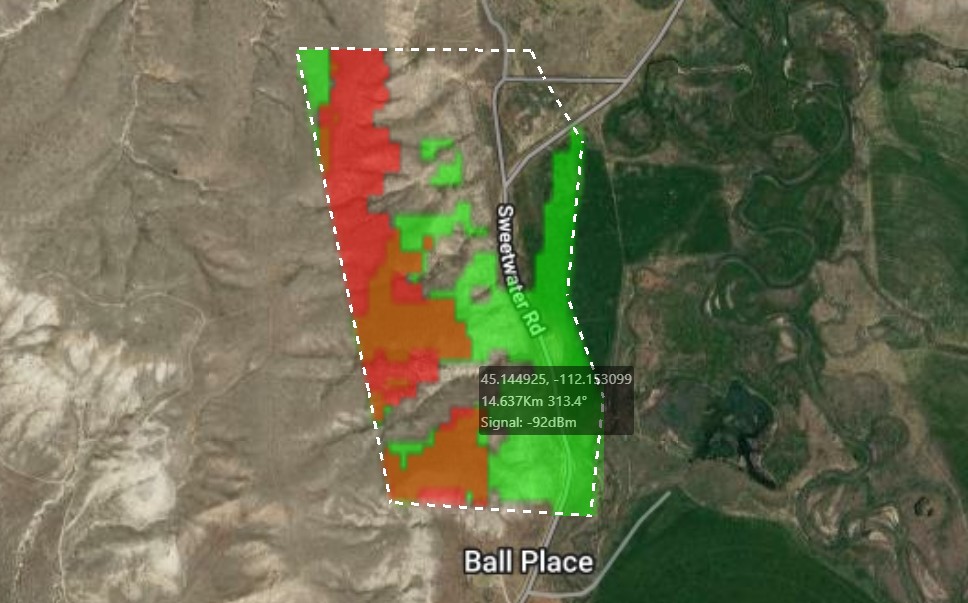
We used our plugin’s limit of 4MP which provides a high resolution result in a practical time of several seconds. Our solution to the ‘mountain repeater’ problem whereby a distant tower is serving a remote location is the bounds feature. This API parameter defines a polygon which focuses processing effort to increase speed and accuracy.
As you can see from the images, the difference the bounds feature offers is significant. It allows the simulation of high resolution at long distances which previously would have been impractical with a ‘big heatmap’.
We drove to the relay we wanted to use and were disappointed to find it was on private land which was time well spent none the less. As a result we identified a secondary site on a layby to the north which was the best we could do.

Setup, Monday
Our radio partner trusted our recommendation and deployed a Comrod ETAMs mast to the layby despite it not being recommended as one of the official repeater positions.
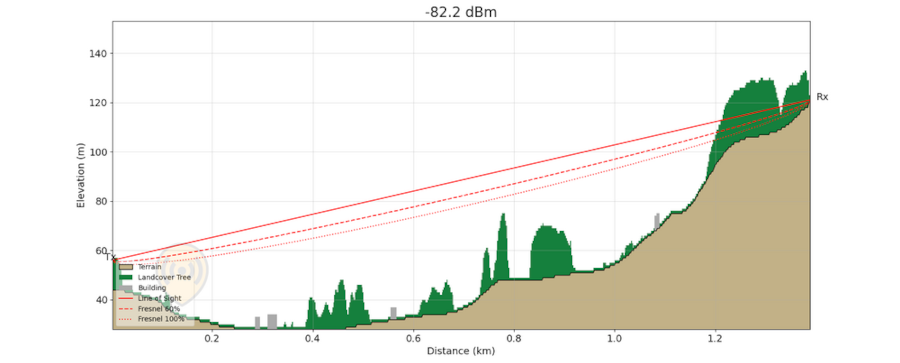
The first (15km) link back to the HQ was barely workable which aligned with the fringe heatmaps we had generated. The weak link was immediately made good by climbing the steep hill overlooking the HQ. The additional height cleared the Fresnel zone which was obstructed by trees and buildings in the valley.

With the first link in, focus shifted to the long link to the mine.
We drove up to the mine and headed out on foot to the exposed hillside we had identified from the mine. This was a steep and difficult route, in hot weather, with rattlesnakes and bears, which Alex H from Trellisware made no less than 5 times. Give that man a raise!
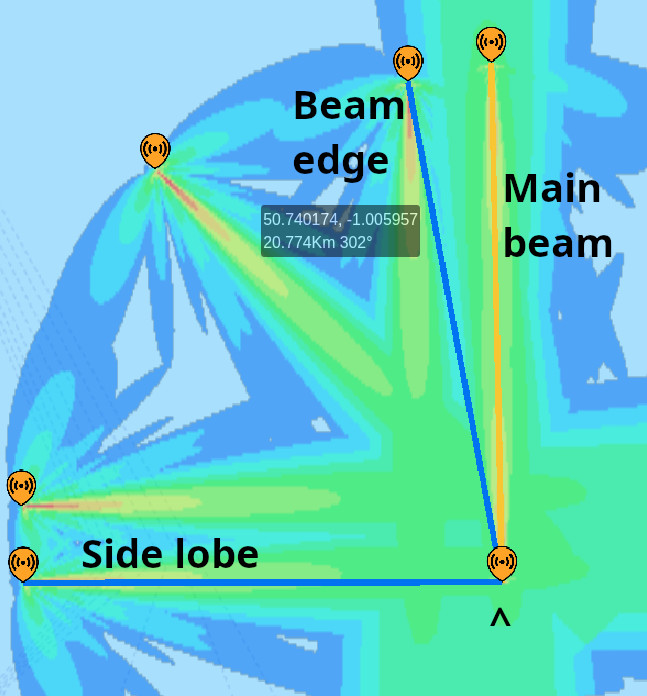
On the hill we used ATAK to navigate to the area on the track on the hill we had identified. This zone covered several prominent rocky outcrops which as we found were popular for sunbathing by snakes. Once in the zone, it became apparent that this would work as radios with low gain whips were connecting to the distant 35km relay. This link was boosted from workable to good, and fit for video, with the deployment of a Farfield Antennas APEX directional antenna.
Our relief at establishing communications was short lived as we were challenged to find a better spot. We used SOOTHSAYER on the CardShark server to simulate the midpoint relay to produce an updated layer. This layer was used to identify a better site nearby at a rocky outcrop on the hill. We relocated to the new site and were pleased to confirm a modest improvement to the link SNR. The scale in the change of location was minor given the 35km distance and the fact both sites had equally great views down the valley but the improvement was notable due to the shape of the convex hill and it validated accurate simulation over ‘looks good’.
During the excitement of closing the big one, we forgot to leave behind a radio at the mine to test the next link. This was soon rectified by a party which returned to the mine and confirmed a good link, which did not come as a surprise given the visibility from the mine and close proximity at ~750m.
A very satisfying radio check from the mine was heard at the HQ 50km away around the valley, over 3 links.


With the sites identified, the network was optimised with wired links between co-located relay nodes on alternative frequencies to increase throughput. There were other configuration changes higher up the OSI model also which are not covered here as we’re focused on establishing layer 1 only. The optimisations were designed to increase throughput and reduce latency to support both video and live UAS control.
Live coverage mapping
In our vehicle we kept our Global Edge server which had a higher endurance than the CardShark. This server was connected to a donor radio’s Wi-Fi access point as a client which enabled it to interact with the Trellisware API.
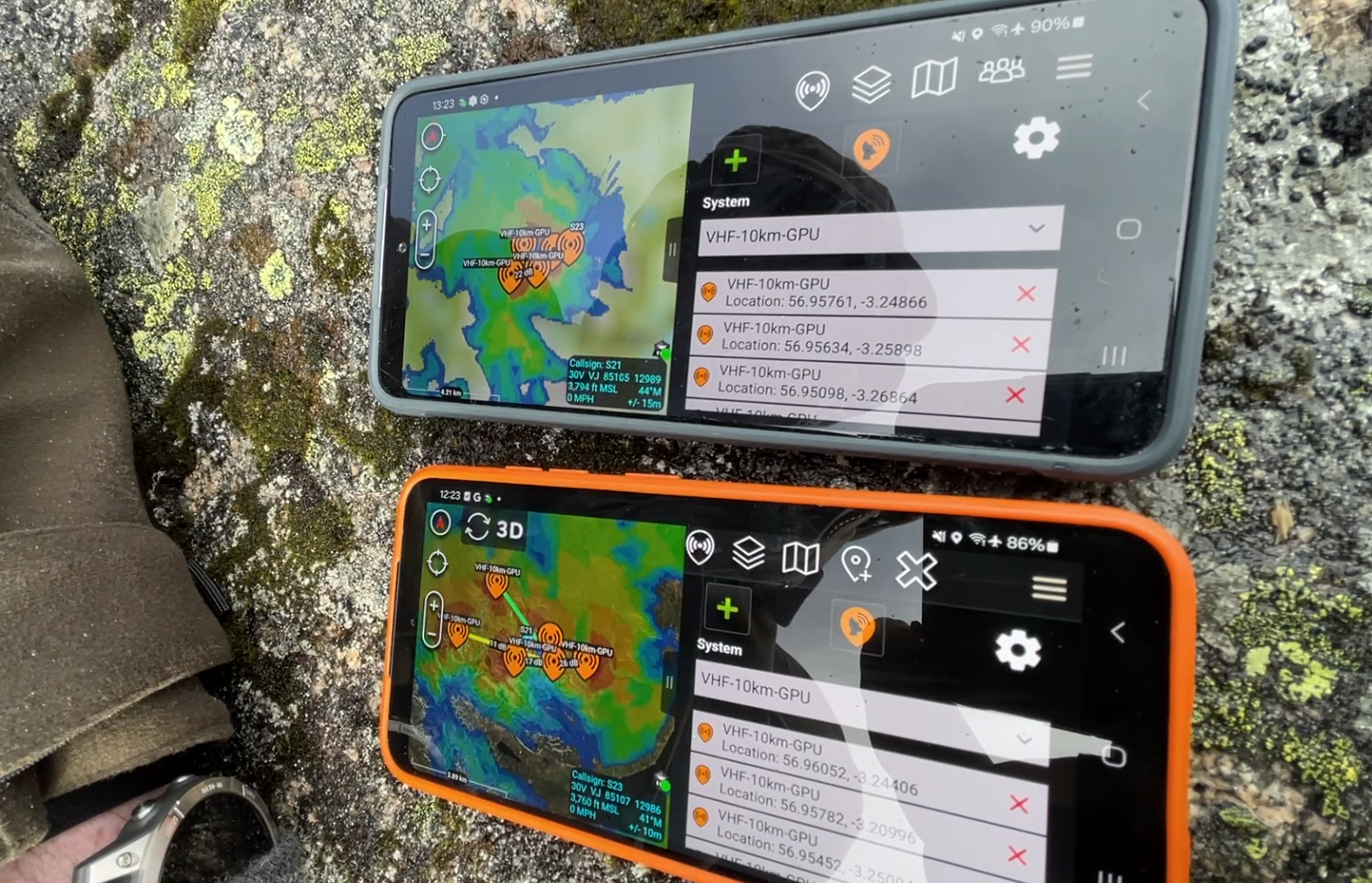
Our Trellisware python script fetches radio metadata to generate coverage heatmaps for the network using live settings including noise. This is presented as a network KML layer which is consumed by clients including ATAK.
We last demonstrated this in our office car park with our own TW-750 radios so it was exciting to use it on a mountain with a diverse network of different radios. We’re pleased to report it worked as designed after a tweak on the mountain to handle output from radios we’ve not worked with before. We’ve even heard a rumour the KML refresh may be lowered this year to support faster refresh rates, nearly 6 years after we requested this.
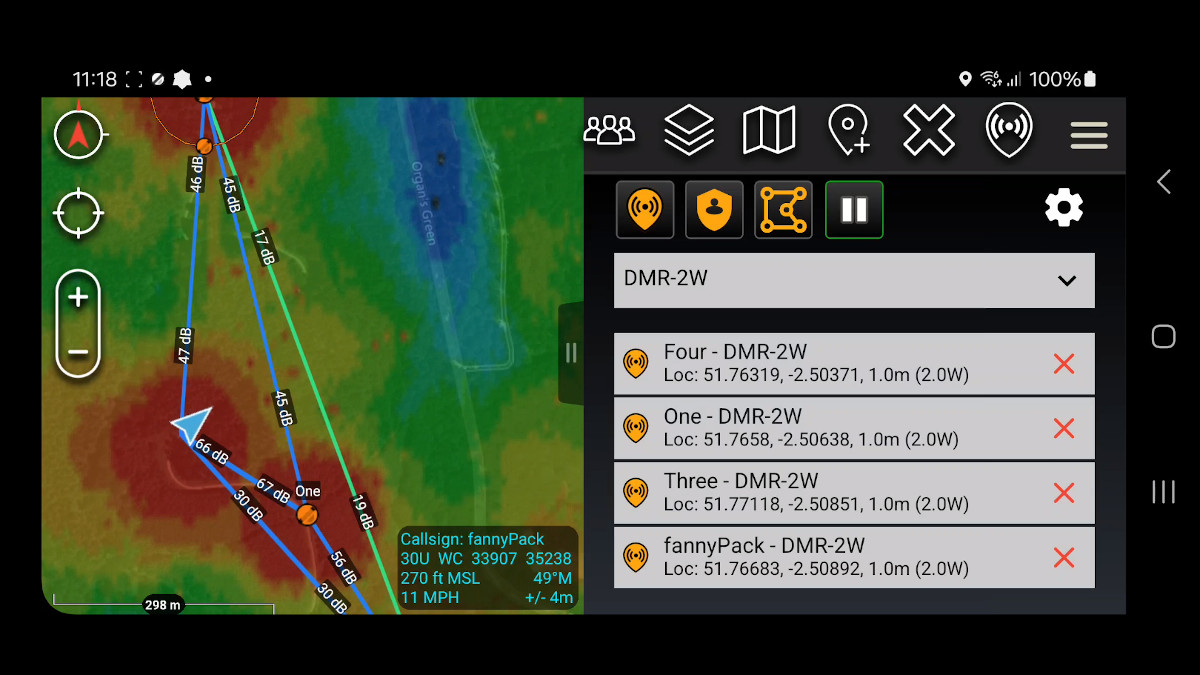
We also exercised the ATAK plugin’s Co-Opt function. This powerful feature allows any callsign on the map to be given a radio template which follows its position. As the callsign moves, the radio coverage moves. You can see a video of it on our youtube channel.

Show time and interference
The network was scheduled to deliver a live video feed of a drone exploring the mine.
Despite a day of successful testing, leaving radios behind overnight in the mountains with wildlife and the elements meant unexpected issues were encountered which required local input to fix. On demo day an eleventh hour reset for the relay was promptly executed by Josh, who ‘hauled ass’ whilst observing local speed limits to get up the valley and save the day.
The live video was streaming well on schedule via a local radio’s WiFi access point until the production tent filled with observers… At this time, the congestion within the 2.4GHz ISM band increased and the impact became obvious as the video deteriorated and then failed. The irony of engineering a 50km muti-hop data network in the mountains and failing at the last 2m inside the tent was a learning point. In hindsight, a wired connection to the tablet would have been safer and people should listen to Peter.
The WiFi link self restored due to Automatic Channel Selection (ACS) and normal service resumed with live UAS video streamed over the RF link under the direction of the HQ.

Summary
The event stress tested our capabilities to the limit, where it matters, and provided invaluable feedback we would never have found in a dozen trade shows or car park tests. We leave with very high confidence and a list of improvements and feature requests from the many customers and partners who we interacted with.
One of the most significant features will be the ability to expedite the site selection process for operators with a prompt to an LLM which can execute the multi-stage process of site selection using accurate radio templates. A lot of firms are chasing this AI dream but very few indeed have a mature, published, API to build upon.
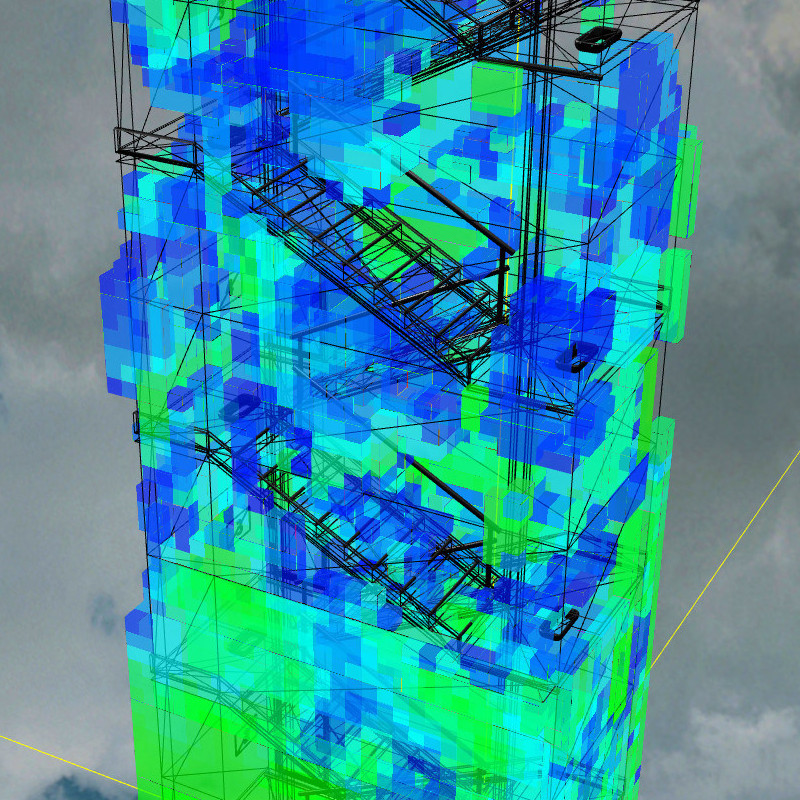
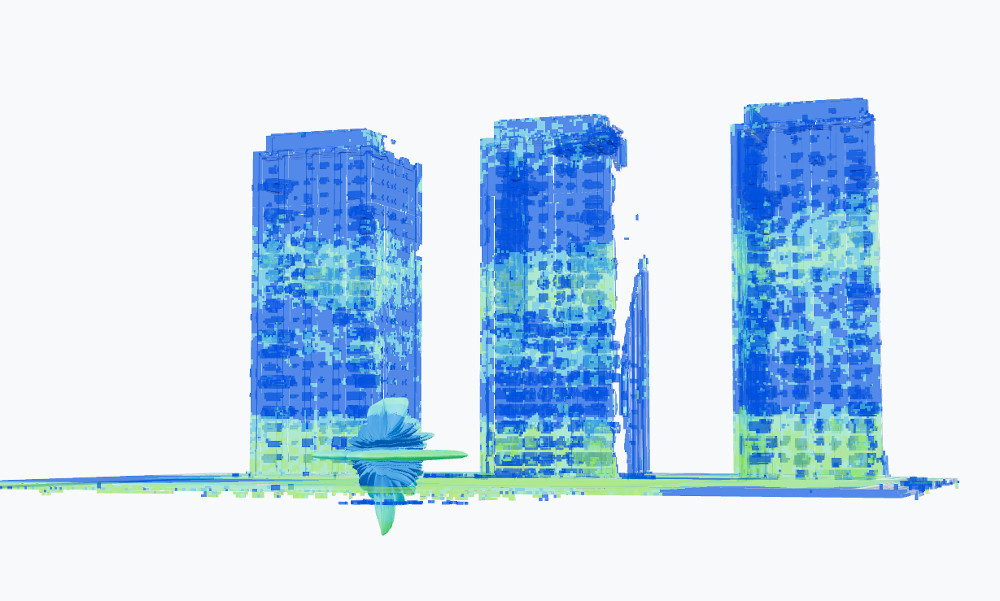
We came prepared to model the inside of the mine using our 3D engine which was risky as we needed to acquire and then vectorise a large LiDAR scan from a robotics partner under a tight schedule. We acquired the model but hit formatting snags during the conversion to glTF so parked that task for another day. We did however produce a useful glTF to 3D tile script to present 3D models on ATAK which we will publish.
Despite the maturity, we’re still not elite enough to have our open source plugin listed on TAK.gov but as the push for published interfaces grows, we’re confident that sharing, not guarding, interfaces is the superior strategy for vendors serious about integration, more so in the age of AI. As more proof, we were pleased to see a shiny new plugin at this show that used our API with a radio API that was developed rapidly by a vendor without our knowledge.
Finally, for anyone still unsure if SOOTHSAYER works offline because our company has Cloud in the name, we can assure you it does as we do not own a Starlink and there is no cell coverage in the upper Ruby valley.
For more offline field tests see our Youtube channel.