
Key Features
- Works on mobile, tablet, desktop interfaces
- Browser based – Any operating system
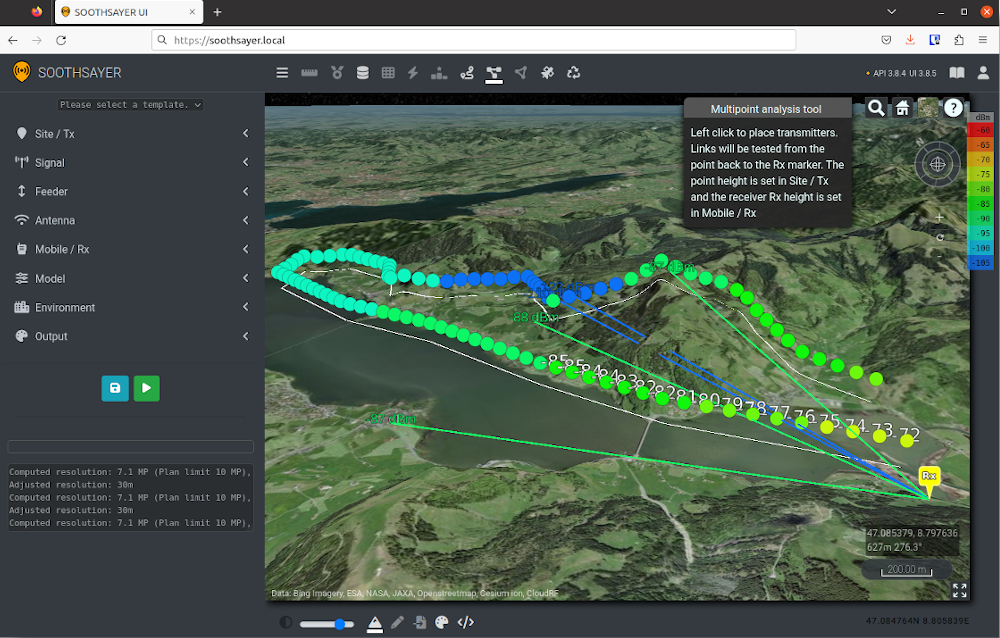
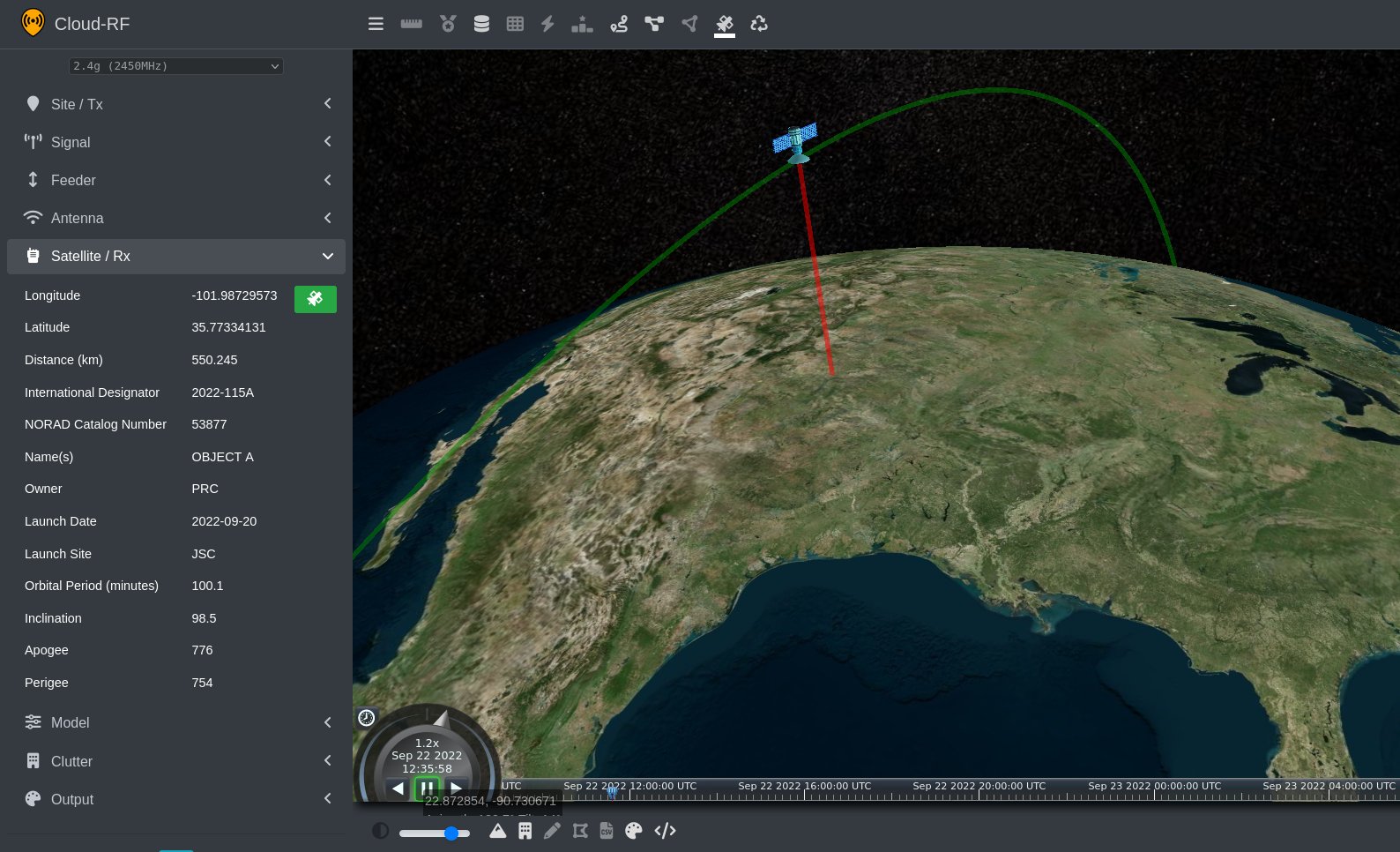
- 3D terrain and view
- Choose from different imagery and mapping layers or BYO
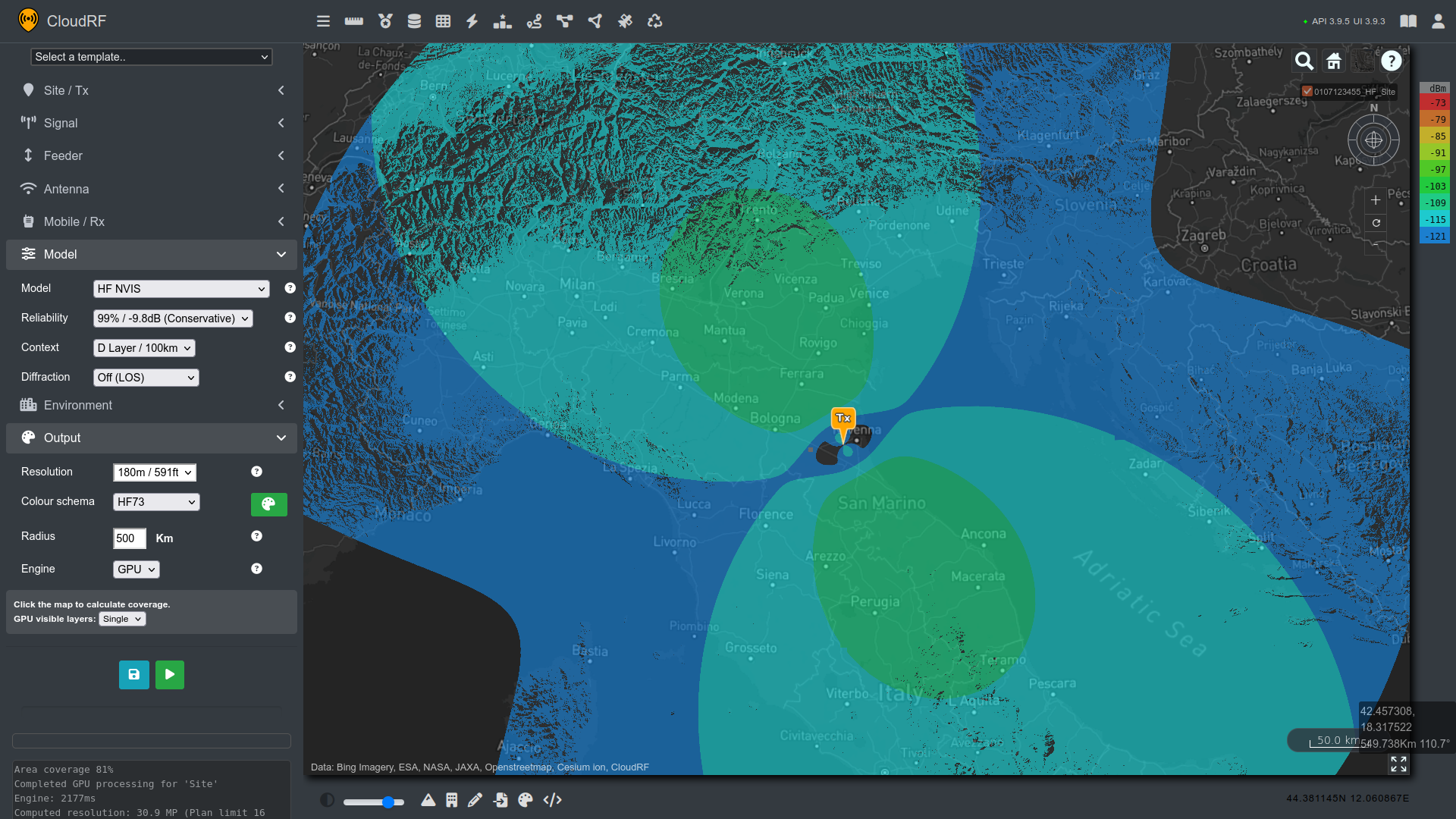
- GPU accelerated


Reference Data
- Global 3D buildings at 2m resolution
- Global landcover at 10m resolution
- Global terrain data at 30m resolution
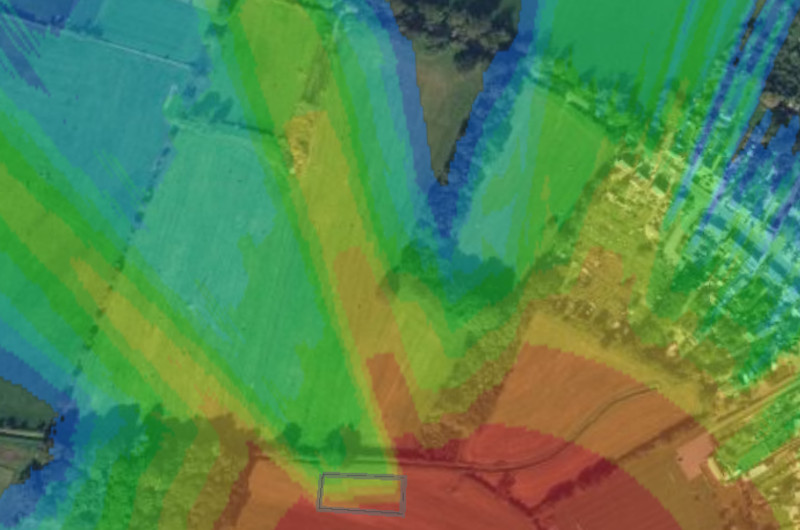
- LiDAR data for select countries and cities at 2-5m resolution
- Antenna pattern database with thousands of manufacturers’ patterns
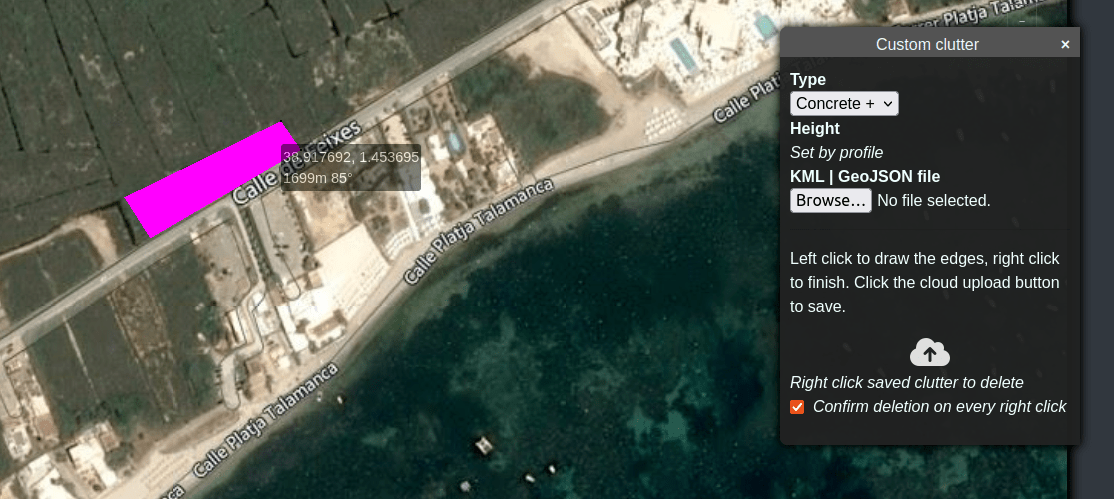
- User defined clutter profiles with variable attenuation
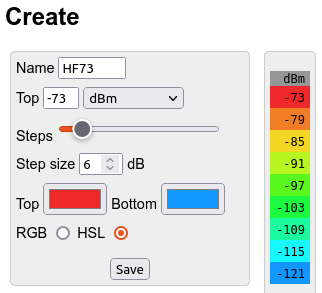
- User defined colour schemas
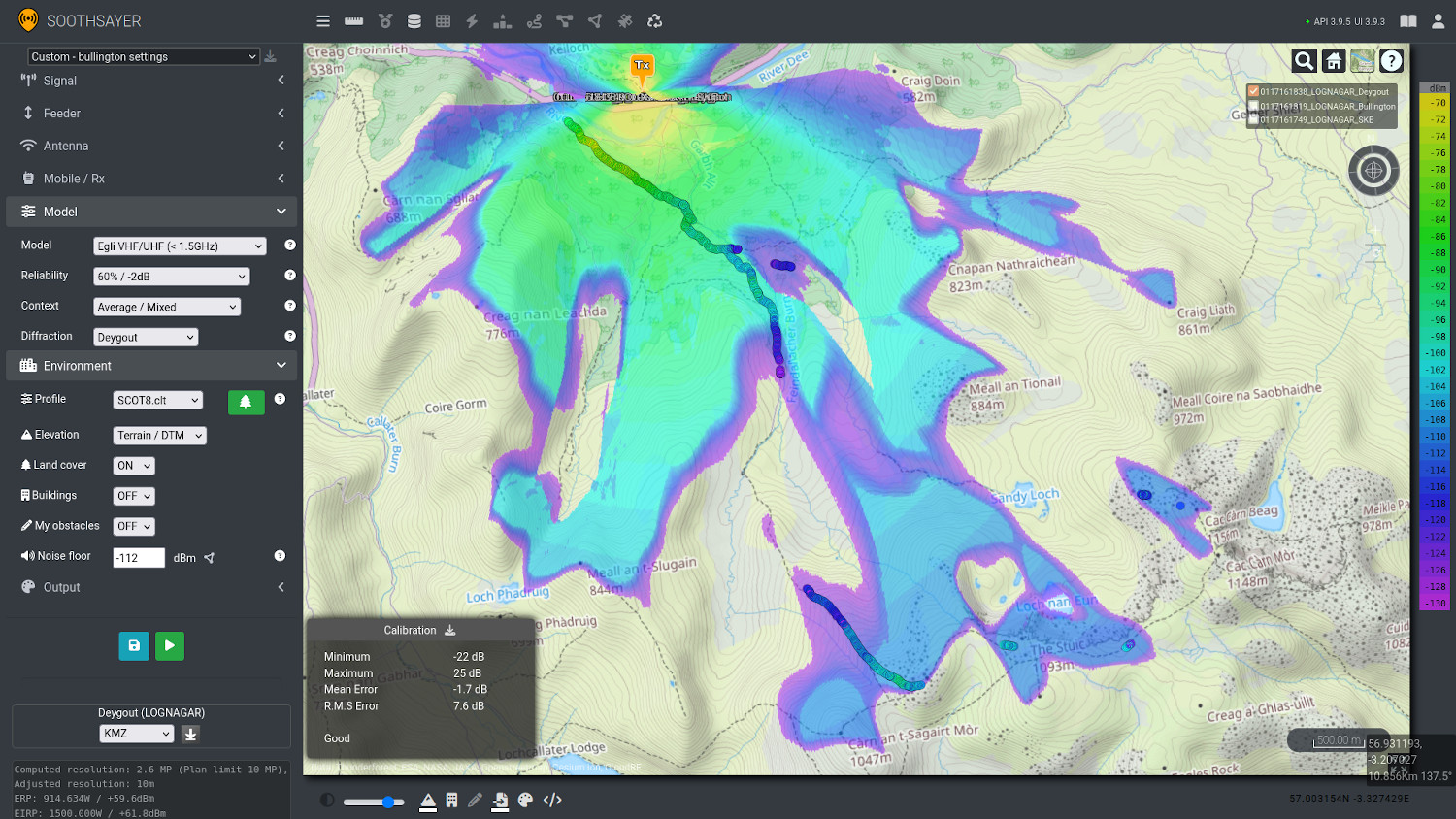
Analysis Functions
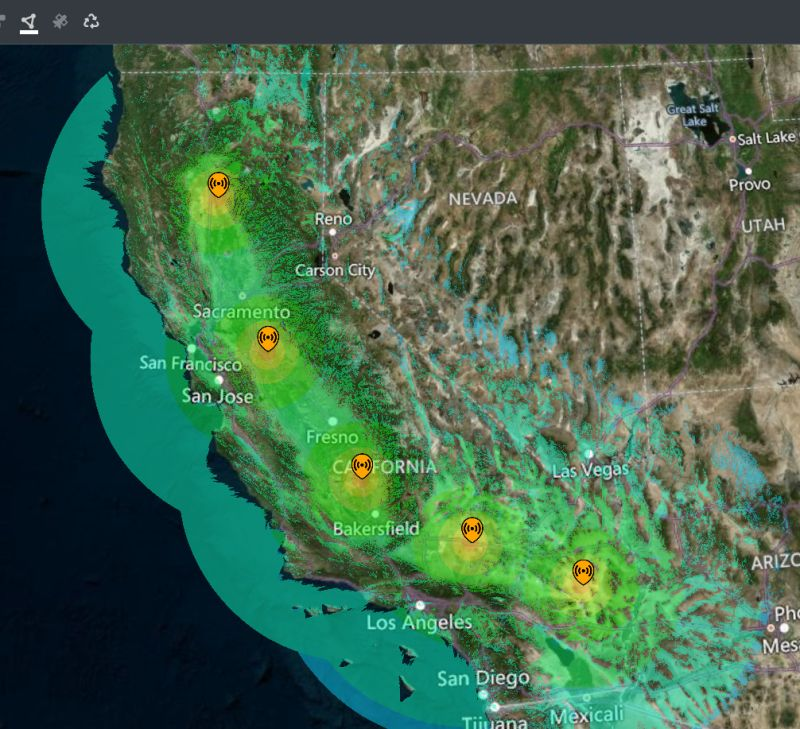
- Area coverage / Point-to-Multipoint (PtMP) out to 500km
- Path profile / Point-to-Point (PtP)
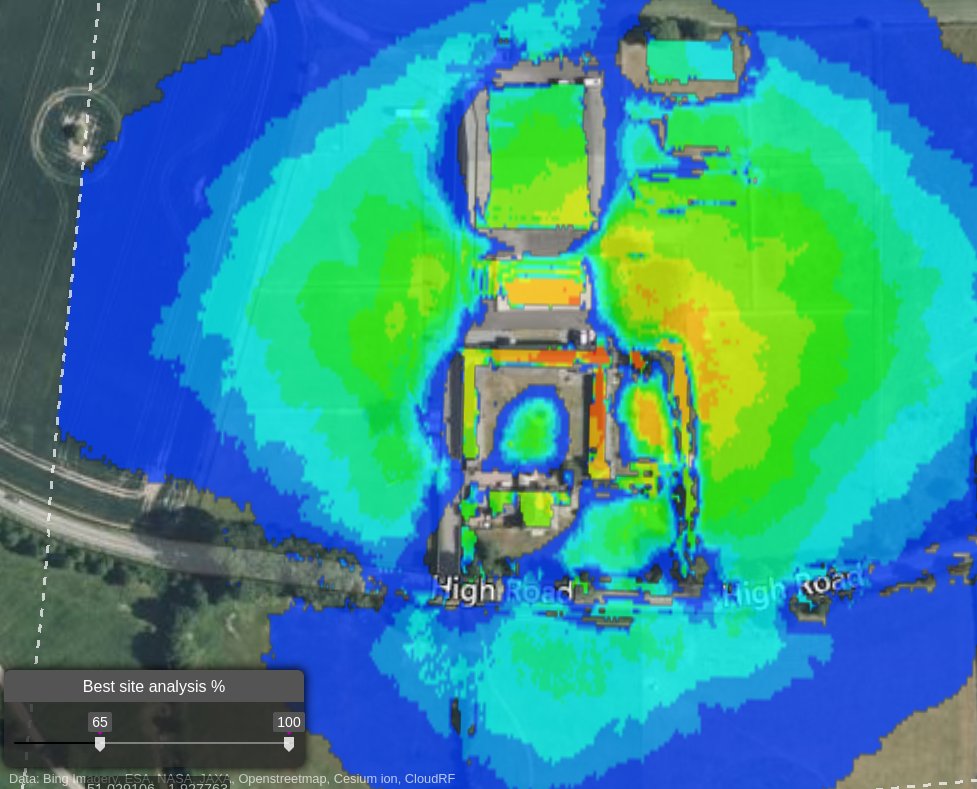
- Best server / Coverage checker
- MANET network planner (links and coverage)
- Satellite LOS tool
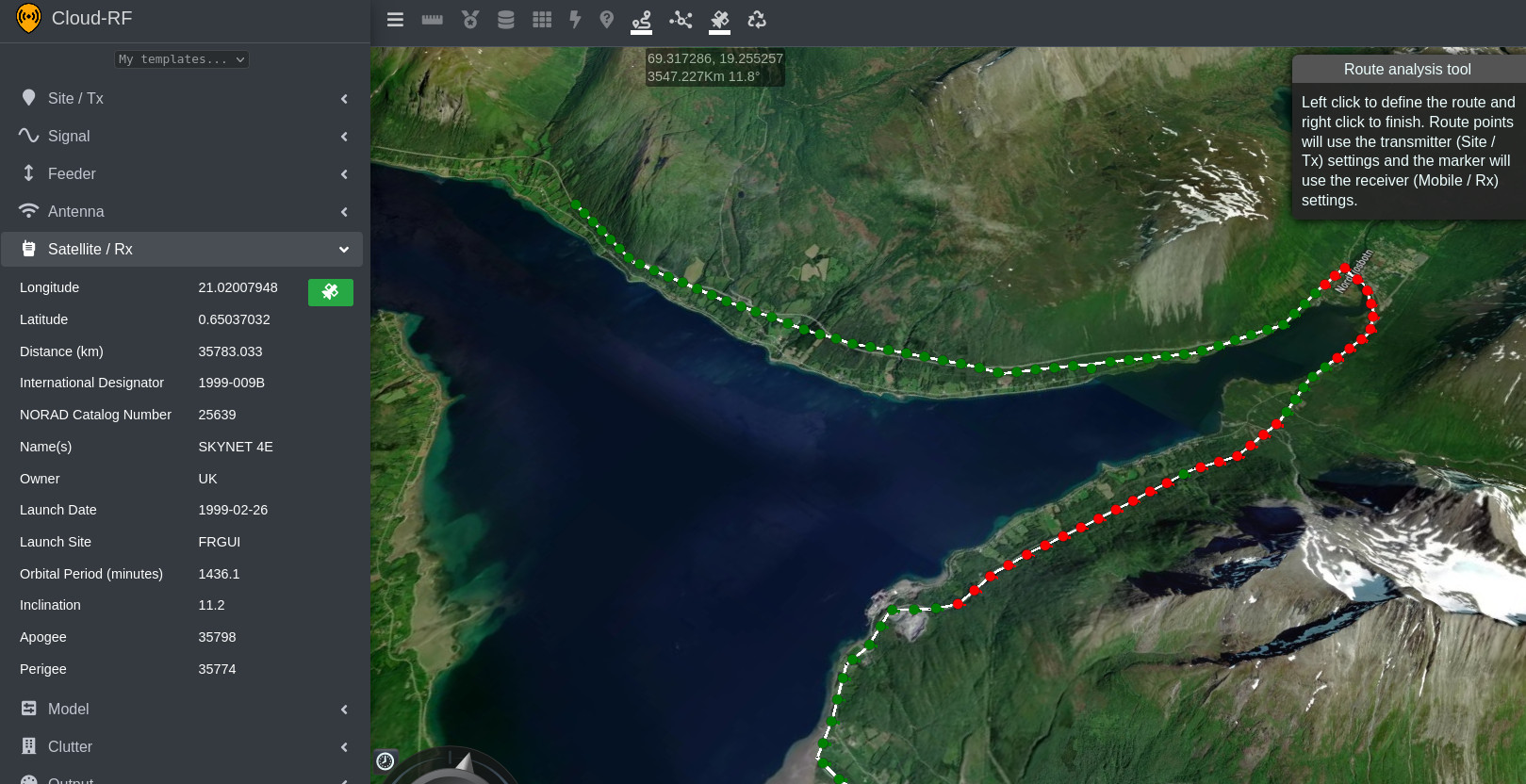
- Satellite route planner
- Automatic CSV processing
- Network super layer / Mesh sites
- CSV import for coverage analysis
- CSV drive test calibration tool
- KML import for MANET planning and best site analysis
- Signal value, distance and heading on cursor hover
- Dynamic ERP & EIRP calculation
- Dynamic feeder loss / efficiency calculation
- Custom antenna pattern tool & real-time polar-plot generation
- Address lookup
Inputs
- Location as Decimal degrees, Degrees/Minutes/Seconds, NATO MGRS
- Height(s) as metres or feet
- Frequency, Power, Bandwidth
- Feeder type, length and connectors
- Antenna and configuration (Polarisation, Azimuth, down-tilt)
- Custom antenna parameters (Beamwidth(s), gain, front-to-back ratio)
- Receiver height, gain and sensitivity
- Measure coverage as dB (Path loss), dBm, dBuV/m or dB (SNR)
- ITU, NTIA and public domain propagation models
- Model reliability and context (Dense, Mixed, open)
- Additional knife-edge-diffraction
- Elevation options for DTM or DSM, both with and without clutter layers
- Configurable clutter attenuation in dB/m
- Resolution 1-180m
- Colour schema (System or custom)
- Radius up to 500km
- Save all settings to a JSON template
Documentation
You can find the web interface documentation here.
Login
Access to the interface requires a Cloud-RF account and at least a free plan.
