Highlights
- Dynamic radio coverage visualisation
- Vendor agnostic radio integration via ATAK
- 450 heat-maps delivered without issue
- Sub-second computation via Cardshark computer
Background
Three years ago we developed a “live” simulation capability using location-aware MANET radios which we described as dynamic radio planning which fused real and planned radio positions. This feature required a third party hardware API with restrictive terms, common in commercial radio, so it exists as a video demo only.
We’ve refreshed and field tested this concept, using modern edge compute and open standards.
ATAK as the common API
Using ATAK as a proprietary API broker, we are now able to do the same via our plugin. The technology agnostic capability can be used with any radio, vehicle or marker on the map and by starting with an open information standard, Cursor-on-Target (CoT), it eliminates the commercial friction with NDAs, proprietary APIs and different vendors.
Open standards unlock low-cost cross-vendor interoperability in a way proprietary standards never can. For example, two vendors can achieve compatibility without knowledge of each other’s products. Better still, compatibility with future products, not yet deployed, can be assured.
The field test
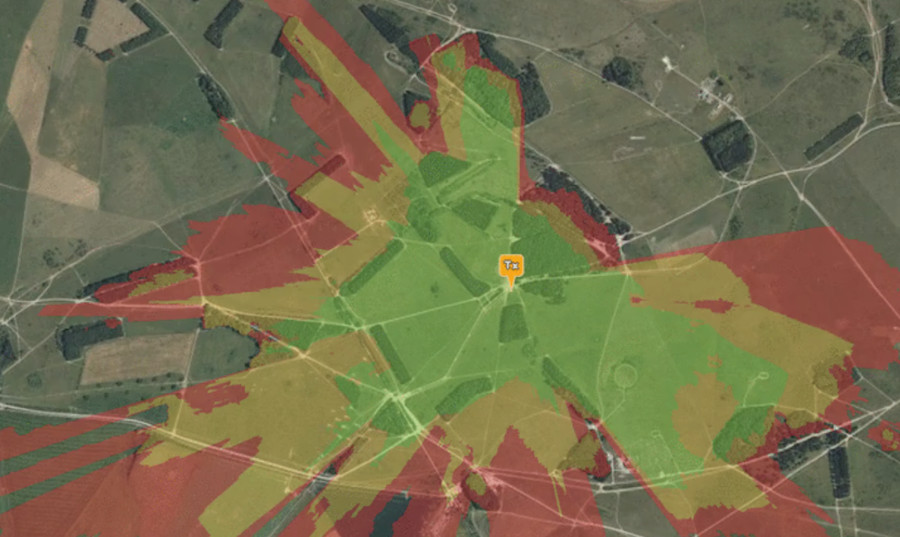
We picked a local Forest to field test this concept using a Cardshark computer which is a rugged Jetson Orin with a 1024 core GPU. We need the GPU to efficiently compute our ‘Multisite‘ network heat maps. The ‘Points‘ links are CPU powered. We’ve worked with Jetsons on previous field tests but under manual control. The automation we’ve added here makes periodic API requests and places the computer under a sustained load.
The radio network was a four Tait 9300 DMR portables on a 2W channel, with one donor radio connected via a USB programming cable. GPS locations were fetched using our Tait script which outputs CoT broadcasts to make them appear (and move) upon the map.
The testing went well and produced 450 heat-maps to validate both the concept and the computer. Crucially, our 9Ah battery depleted only by 25% during 2 hours of intensive testing. Our conclusion is that with a reasonable load and refresh rate this edge capability can be scaled to run all day, as we found in Scotland earlier this year.
Speed test!
Five years ago we asked for the ATAK KML refresh rate to be lowered to enable a “follow me” demo we published and our understanding is it was capped by design at 10s (compared with 1s for Google Earth) due to a concern over excessive bandwidth which was understandable – at the time. A lot has changed in five years of software and radios and now we’re doing the compute locally, this concern is obsolete.
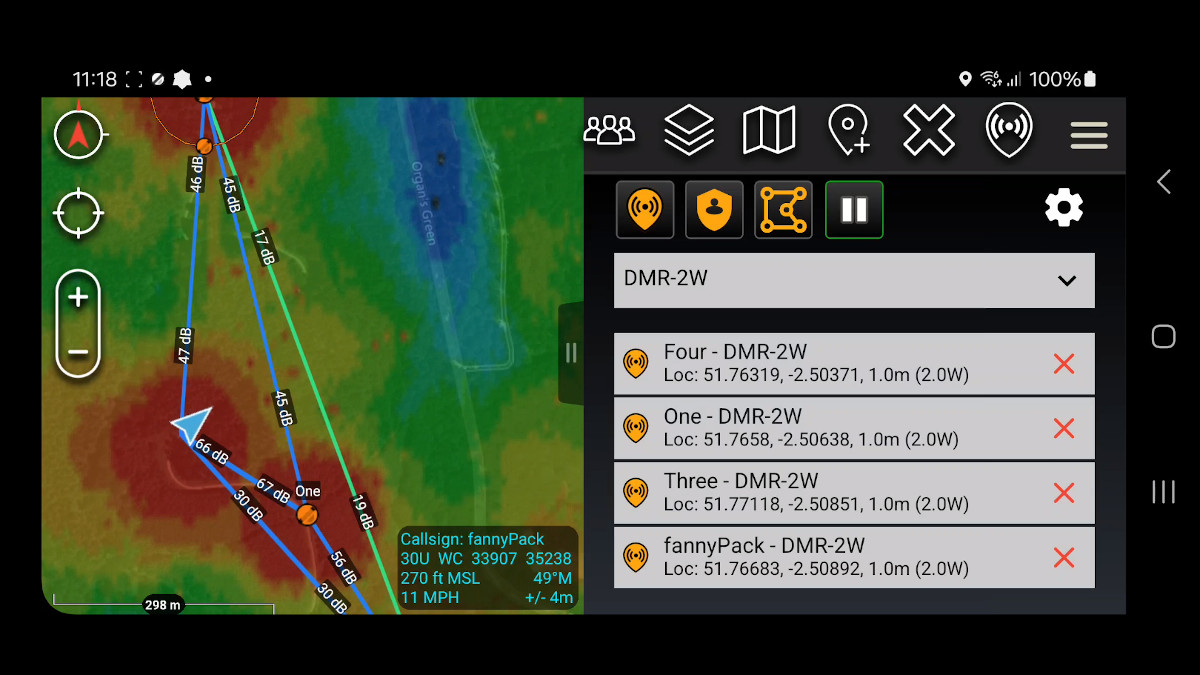
Our GPU engine can model a heatmap in under a second so we bypassed the network KML functionality (which is still a valid way of refreshing heatmaps on ATAK as our Tait plugin does) and implemented our own refresh system, designed for fast moving data. During our speed test, we refreshed the heat-map every 5s which both ATAK and the Cardshark handled comfortably. Logs showed each simulation took under a second with another second for pre/post processing and another for communication. The points requests take 150ms and are called for each radio so four radios would be 600ms, excluding communication.
Issues identified
We identified issues relating to USB tethering which weren’t apparent in the office: The Cardshark does not have WiFi which we employed for previous field tests so this made communication more challenging.
We were able to workaround this for the test with a WiFi hotspot to fool the plugin into thinking it was on a network. As we were using dynamic IP addresses provided by the phone and the Cardshark has no interface, we ex-filtrated the IP information we needed via ATAK which is why there is a IP-address-callsign visible in the video.
The Cardshark is a fanless design which requires airflow to cool it. We deployed it in a bum bag / fanny pack where it unsurprisingly became hot during intensive use but still functioned well. For enduring use, this would need to be mounted externally and the workload throttled accordingly.
Our radio template needed work as only afterwards did we note we did not set the DMR template’s noise floor which defaulted to -133dBm based upon the narrow 12.5KHz bandwidth. This was why there were blue 50dB links visible in the video when in reality the noise floor was likely closer to -113dBm and these links were a more realistic 30dB SNR. This issue did not affect the heatmap which used received power units and we’re satisfied from calibrating with large data sets that the modelling is accurate.
Credits
A special thanks to GoTak LLC who helped us develop and test the live Co-Opt feature in ATAK and Carnegie Robotics for producing the Cardshark and providing timely support.
Links
SOOTHSAYER self hosted server: https://cloudrf.com/soothsayer
Cardshark computer: https://carnegierobotics.com/cardshark
SOOTHSAYER ATAK plugin: https://github.com/Cloud-RF/SOOTHSAYER-ATAK-plugin
Tait ATAK plugin: https://github.com/Cloud-RF/CloudRF-API-clients/tree/master/integrations/Tait
Fanny pack: https://www.osprey.com/gb/osprey-seral-7-s23?size=One+Size&colour=Black