



ATAK Plugin
Android Team Awareness Kit (TAK) is a US Government situational awareness application, available for free on Android (ATAK). The civilian version is available for free on the Google Play store.
ATAK https://play.google.com/store/apps/details?id=com.atakmap.app.civ

Requirements
ATAK (CIV or MIL)
A CloudRF account or a SOOTHSAYER server
A network connection
Our plugin is signed by the TAK Product Center (TPC) which at the time of writing means it works on Civilian and Government flavours.
It is also signed by our Google Play key so can be fetched from the app store.
Plugin installation
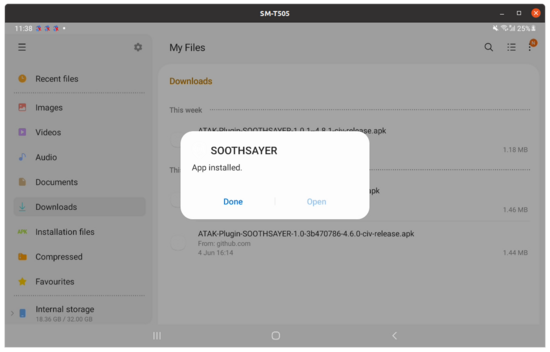
Install ATAK on your phone/tablet and then download the latest APK file from https://cloudrf.com/atak-plugin or Google Play.
You can download it directly from the device with a browser, send the file to the device via email/IM or copy it over via USB.
Before you attempt installation of the APK, ensure ATAK is running. If it is not running, installation will fail which is expected behaviour.
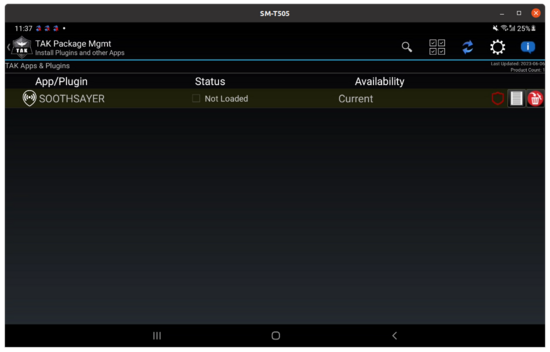
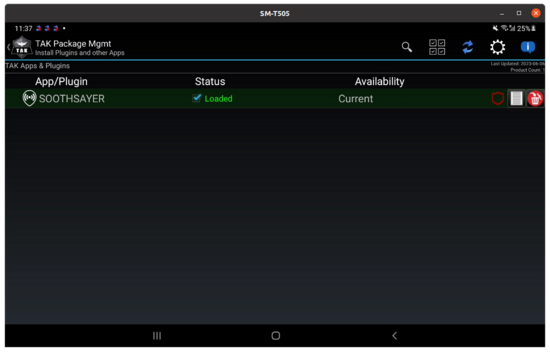
Within ATAK, open the plugin manager (jigsaw icon) and you should see the SOOTHSAYER plugin listed as available but not loaded. At this point you need to check the central status box to load the plugin. This is also where ATAK will check compatibility.
Validating the plugin version
To see details about the plugin version, click the report icon to the right. It should specify the required Android OS (10 in our case) and ATAK version (4.8.1.CIV) as well as the signature validity which for a TPC signed plugin should be valid:

Adding a shortcut in ATAK
Once installed the plugin will be available within ATAK. To add it to the quick menu, click the pencil marker adjacent to the “Tools” label above the icons. This opens up the navigation bar to editing so you can drag your new plugin up there.
Logging in to your account
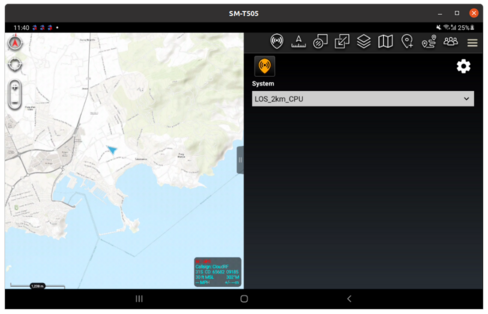
Find the CloudRF / SOOTHSAYER icon in the tools to open the plugin. You should see a blank form with a list select for radios and a top row of function buttons.
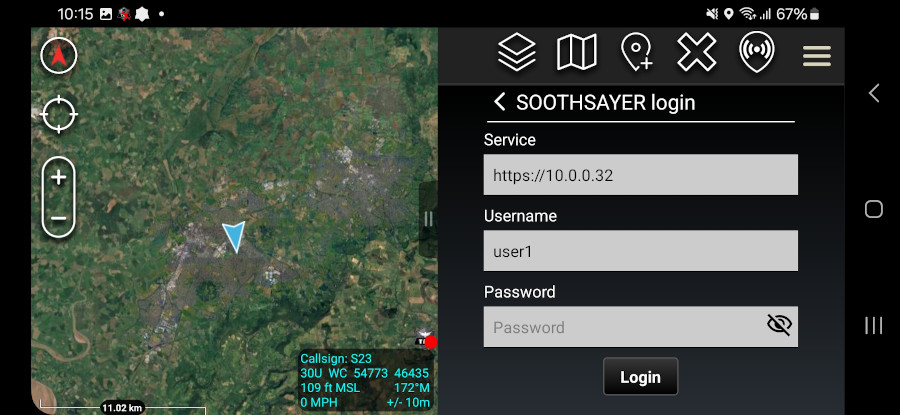
The plugin needs a CloudRF or SOOTHSAYER account to function. To login to your account, press the corner settings button and then navigate to the account login page via the account button at the bottom.
Enter your server’s address starting with https://
Enter your username and password then click ‘Login’
Service description |
Plugin URL |
|---|---|
CloudRF |
https://api.cloudrf.com |
SOOTHSAYER (IP) |
https://1.2.3.4 |
SOOTHSAYER (Domain) |
https://soothsayer.mydomain.com |
A successful login will redirect you back to the plugin start page and synchronise RF templates from your account to your device.
Using the plugin
To add a radio to the map, choose the system from the drop down list, then click the SOOTHSAYER button above it. A marker will be added to the middle of the map.
To trigger a calculation, you can press the green Play button or press and then drag the marker to the desired location using a “long press”.
Settings
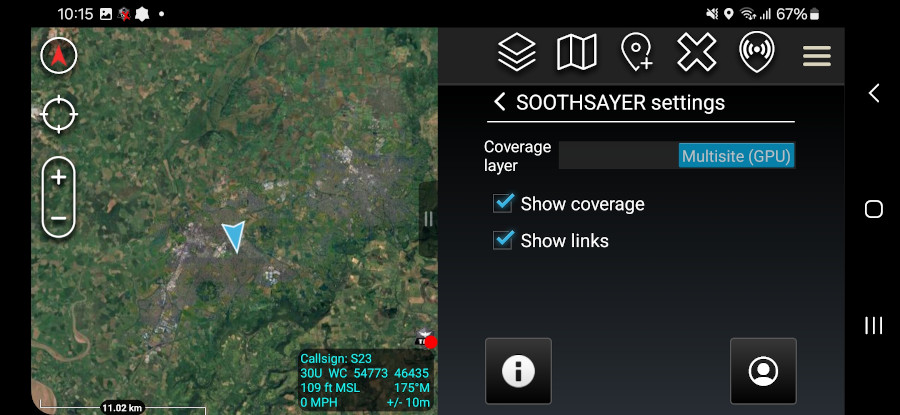
Coverage layer
Single site mode places each radio coverage as a separate image layer. This can get cluttered with many radios but can be managed via the native layer manager.
Multisite (GPU) mode is a more powerful capability which models all radios together to show network coverage. This updates one “MULTISITE” layer only.
Multisite requires a server with a GPU or a CloudRF subscription.
Show coverage
This checkbox will show or hide RF coverage. This can be useful to save bandwidth if the interest is links.
Show links
This checkbox will show or hide RF links between radios. This uses less bandwidth than coverage layers, and is faster.
![]()
A multisite layer is a single layer which is available in the ATAK layers menu under the “SOOTHSAYER” category. It can be hidden or deleted to suit.
Polygon tool
The polygon tool allows focused studies of distant areas using the “bounds” parameter in the API and Best Site Analysis (BSA). This allows faster, smaller, higher resolution calculations which reduce bandwidth and memory consumption in the viewer whilst keeping the wider map clear.
To use it, click the polygon button and draw a shape upon the map. This shape will be referenced for all future calculations.


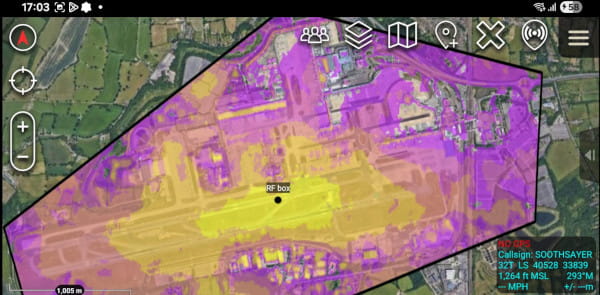
Best Site Analysis
The BSA tool performs a Monte Carlo simulation of hundreds of random sites within a polygon. These sites are graded and represented as a plasma coloured heatmap.
To use it, draw a polygon first around the area of interest. Ensure you focus on the candidate sites and do not cast your net any wider than you need.
The best site (top 10%) is bright yellow and the worst (bottom 10%) is not coloured. This helps decision support with choosing between the better of two sites, or hopefully avoiding a bad site.
Tip: You can model LEO and CUAS with this by setting a receiver height to 1000m and a radius of the same from your objective area. The sites with the very best view of the sky will be graded higher than others…
Co-Opt tool

The Co-opt tool allows operators to adopt any marker/vehicle/person/radio upon the map and model live radio coverage. For a moving track like a vehicle this is a powerful standards based upgrade which provides live RF mapping.
When the tool is selected, available map markers will be listed. These can be assigned a user defined radio template eg. “UHF radio 2W”. Templates can be defined within other interfaces or shared as .json files.
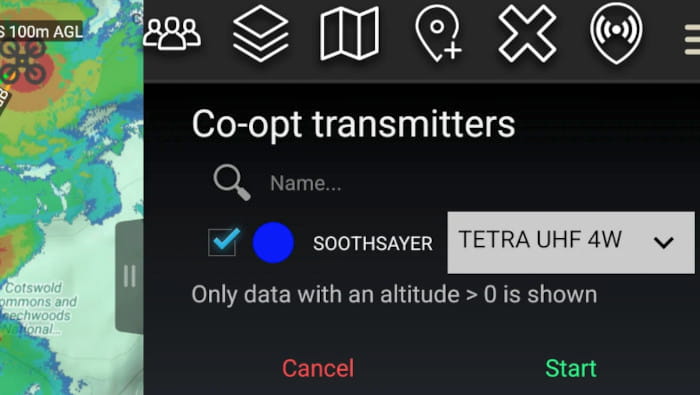
Once you press Start, the coverage will be modelled according to user defined rules in the Co-opt options. If you select a fixed interval like 30s, coverage for adopted markers will be calculated every 30s.
If you select distance, coverage will only be calculated if a distance threshold is reached. This is more efficient and uses less bandwidth.
The bandwidth use of this feature varies depending on both your refresh rate and image resolution, defined within the layers options and selected layers. If you have low bandwidth, you can disable the heatmap coverage layer and if you have bandwidth or your server is local you can increase the megapixels of your coverage layer from the layer options.
Editing a transmitter
Transmitter settings can be edited once they’re on the map.
Select the transmitter to open the menu then click the pencil to edit the settings. An edit form will open which supports Height, Power, Frequency, Azimuth, Bandwidth and Noise. Click recalculate to apply any change(s). Template files are unaffected and multiple azimuths are supported separated by commas.

Other template settings can be edited in the .json template file on the SD card.
KMZ export
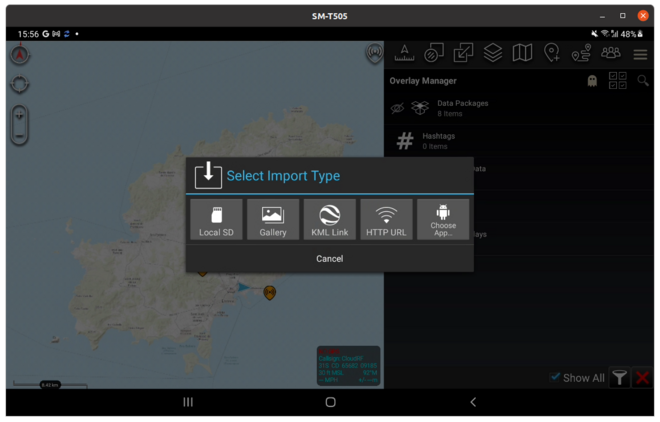
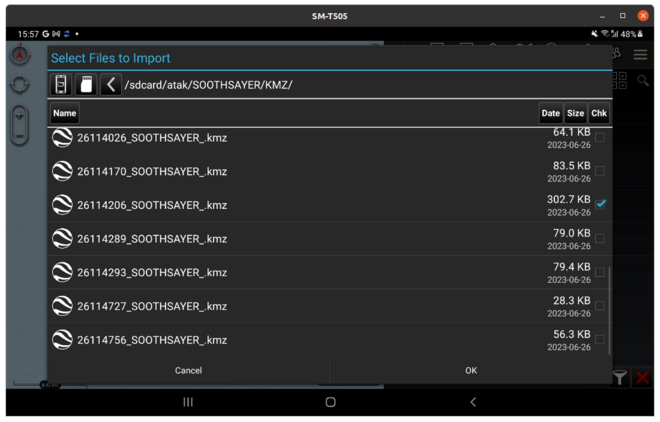
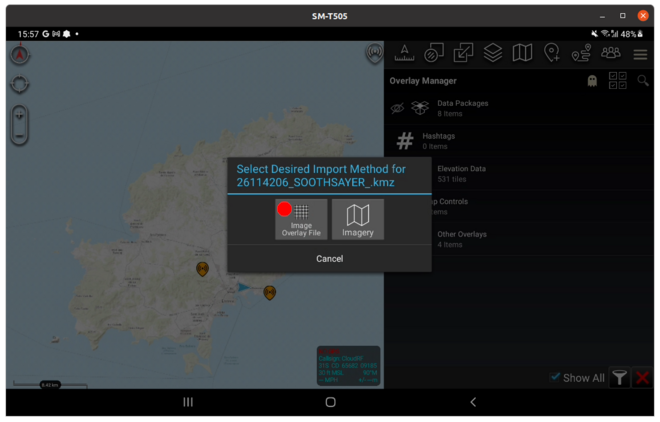
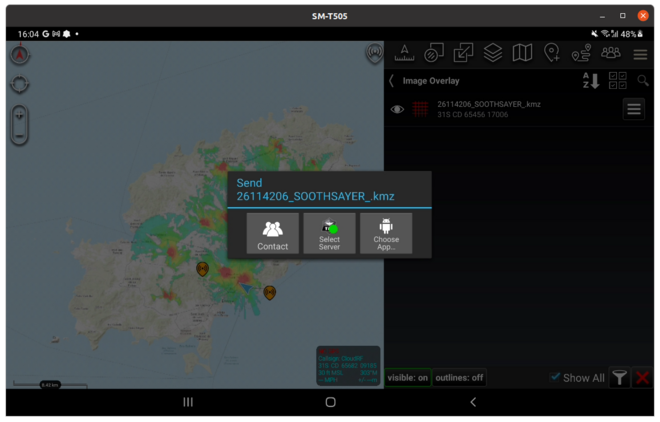
Layers generated with the plugin are saved as KMZ on the SD card in the atak/SOOTHSAYER/KMZ/ folder. You can load them into ATAK as standard KMZ overlays using the “Local import” dialog or export them to another viewer such as WinTAK or TAK-X. When prompted for a choice of the import method, choose “Image Overlay File”.
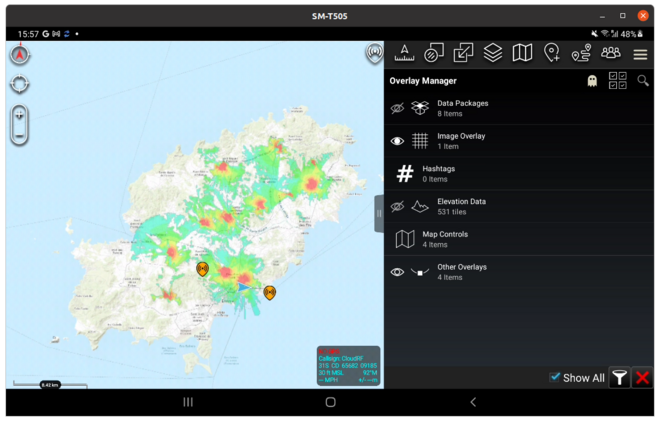
To send a KMZ to another TAK user, load it onto your map to validate it’s the right one, then using ATAK’s native send functionality, click the 3 bars to the right of the selected layer to open the send dialog. From here you can choose to send it to a contact, server or third party app eg. Bluetooth or Google Drive.
Radio Templates
Templates are synchronised after you login with your account.
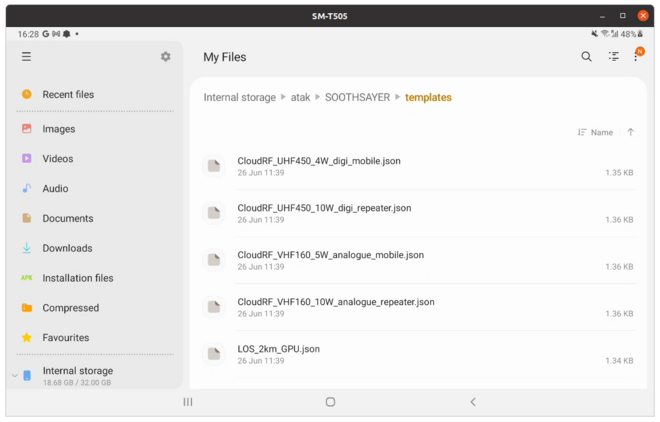
To add local radio systems, place your CloudRF/SOOTHSAYER JSON templates in the atak/SOOTHSAYER/templates folder. You can also download templates as .json files from the top left corner in the CloudRF/SOOTHSAYER web interface.
A template can be edited within any text editor and must conform to the CloudRF API specification detailed at https://cloudrf.com/documentation/developer/
Example DMR template
This template is for a 700MHz handheld radio with 2W of RF power, a GPU engine (engine: 1) with the General Purpose model (#10), Deygout diffraction (#4), a 3km radius and 4m resolution and buildings data.
{
"version": "CloudRF-API-v3.8.2",
"reference": "https://cloudrf.com/documentation/developer/",
"template": {
"name": "Motorola DMR 2W",
"service": "CloudRF https://api.cloudrf.com",
"created_at": "2023-04-12T06:35:40+00:00",
"owner": 1,
"bom_value": 0
},
"site": "Site",
"network": "MOTO",
"engine": 1,
"coordinates": 1,
"transmitter": {
"lat": 51.96403,
"lon": -2.113952,
"alt": 2,
"frq": 700,
"txw": 2,
"bwi": 0.1,
"powerUnit": "W"
},
"receiver": {
"lat": 0,
"lon": 0,
"alt": 1,
"rxg": 2,
"rxs": -100
},
"feeder": {
"flt": 1,
"fll": 0,
"fcc": 0
},
"antenna": {
"mode": "template",
"txg": 2.15,
"txl": 0,
"ant": 39,
"azi": 0,
"tlt": 0,
"hbw": 1,
"vbw": 1,
"fbr": 2.15,
"pol": "v"
},
"model": {
"pm": 10,
"pe": 2,
"ked": 4,
"rel": 70
},
"environment": {
"clt": "Minimal.clt",
"elevation": 1,
"landcover": 1,
"buildings": 1,
"obstacles": 0
},
"output": {
"units": "m",
"col": "LTE.dBm",
"out": 2,
"ber": 1,
"mod": 0,
"nf": -99,
"res": 4,
"rad": 3
}
}
Example GPU ‘line of sight’ template
This template uses the more powerful GPU engine (engine: 1) to model line of sight out to 3km at 2m resolution (if your area of interest has 2m LiDAR).
{
"version": "CloudRF-API-v3.8.2",
"reference": "https://cloudrf.com/documentation/developer/",
"template": {
"name": "LOS_3km_2m_GPU",
"service": "SOOTHSAYER https://185.11.204.106",
"created_at": "2023-05-05T15:43:42+00:00",
"owner": 8,
"bom_value": 0
},
"site": "Site",
"network": "TALON",
"engine": 1,
"coordinates": 1,
"transmitter": {
"lat": 50.806335,
"lon": -1.112032,
"alt": 2,
"frq": 1250,
"txw": 2,
"bwi": 0.1,
"powerUnit": "W"
},
"receiver": {
"lat": 38.913,
"lon": 1.45,
"alt": 1,
"rxg": 2,
"rxs": -90
},
"feeder": {
"flt": 1,
"fll": 0,
"fcc": 0
},
"antenna": {
"mode": "template",
"txg": 2,
"txl": 0,
"ant": 39,
"azi": 0,
"tlt": 0,
"hbw": 1,
"vbw": 1,
"fbr": 2,
"pol": "v"
},
"model": {
"pm": 7,
"pe": 2,
"ked": 0,
"rel": 50
},
"environment": {
"clm": 0,
"cll": 0,
"clt": "Temperate.clt"
},
"output": {
"units": "m",
"col": "GREEN.dBm",
"out": 2,
"ber": 1,
"mod": 0,
"nf": -99,
"res": 2,
"rad": 3
}
}
Template limits
As a server based system, limits for APIs and accounts are set at the server. For premium users this means a 500km / 310Mi radius and a resolution between 1m / 3ft. The combination of these two will determine the resulting file size. The API will automatically reduce unreasonable parameters to fit within memory.
As well as memory, a large layer needs more bandwidth to communicate and is generally not recommended. You should be aiming for smaller layers which can be generated and communicated quickly. You can still do a large radius eg. > 100km, but will need to offset your resolution to keep the total size less than 1 mega pixels (1000 x 1000px).
As a rule of thumb, multiply the radius in km by 2 to get the resolution in metres
The following guide is recommend for practical 1MP ATAK templates:
Desired radius km |
Recommended max resolution m |
|---|---|
1 |
2 |
2 |
4 |
5 |
10 |
10 |
20 |
20 |
40 |
50 |
100 |
100 |
200 |
150 |
300 |
Giant airborne calculations
The API can model out to 500km radius for aircraft. If you set 500km as the radius with 100m resolution you are generating a 10k x 10k image measuring 100 mega pixels! This will take a long time to make, a long time to download and then will crash ATAK, and any other Android map for that matter. To do this scale of calculation, use a resolution of 300m which makes a more digestible 11MP image. Better still reduce the radius to the radio horizon which is 357km for an aircraft at 10,000m (33,000ft).
Custom icons
You can insert a small custom icon into a JSON template as a base64 encoded PNG with the “custom_icon” value. The example JSON template below has a name of CUSTOM_ICON with a PNG radio icon and a GPU engine defined at the top level of the template. Keep the PNG images small (~ 48x48px) to keep memory use down.
{
"custom_icon": "data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAACAAAAAgCAYAAABzenr0AAAH4HpUWHRSYXcgcHJvZmlsZSB0eXBlIGV4aWYAAHjarZdpciM7DoT/8xRzBG7gchxwi5gbvOPPB0py2912jx3xVKFiicViAUhkAnL7n/8e9x8+MbfsstRWeimeT+65R+Wi+cen33Pw+Z7vJz5v8fvDvHu7EZlKjOnxs+pzvTIvvx54vSOMj/OuPe/E9tzoeeO1YbI329vWeyOZj4/5kJ8b9f24KL3V96aOp6nzufCa8vzO/fAwPF9mv937iVyJ0hJWpRh3Yvqe28OCZN+UlLFxjqnZOu5rkiSOIaeXrwTkg3uv0fv3AfoQ5NeV+z36b1e/BT/qcz79FsvyjBEXn94I8nnwb4jfvTi9WRQ/3qjrDeE/gnzOaufsh3eaCxEtz4zy7hUde4aFg5Cn+1jhqHyF63qPztG8+gnky08/OGboIYLKcSGHFTScsO84w8TEHHesjDFOYLG5lmrscYJYAByOcGJNPS0QjGnG7QA0p/hmS7jv7fd9MzTevAJLY2CzwCNfHu5vN39yuHOmhSj49hYr7IqWuZhhyNmZVQASzhM3uQF+HU/4/bv8IVVBUG6YGw6qH48thoRfuZUuzol1wvigUHDA/diAEPFuwZiQQMCXkCSU4GuMNQTi2ABIsTymHAcIBJG4MDLmlEp0NUIZ3s0zNdy1UWKJNo02GX1SSRVselLAylnIn4qS9axQLItIkSrNSRctqeQipZRaTOS0ppqr1FJrbbVXbanlJq202lrrTXvsCQ2UXnrtrfeuGp3yImUvZb0yM+JIIw8ZZdTRRh86SZ+Zp8wy62yzT11xpYVMrLLqaqsv3cFtlGLnLbvsutvuWw+5dtLJR0459bTTj76h9kT1j+MHqIUnavEiZevqG2rMulpfWwSTEzHMQCzmAOLVECCho2HmW8g5GnKGme+mchIxUgwbt4IhBoR5hygnvGH3C7lv4eakfQu3+P+Qcwbdv4GcA7o/cfsEtWV1bl7EHiy0mPoE+1ijsTm+3nP6zhi71LmTnLxWnb1myuSQvmSm5cpaofi0p3xzty9G942FIKyn4nHfRBifdNQ9qG2L2M5SF7ghtYdgYfNJKsgzoRpSRoyD2JMIR/Cib6kaVm3kTUm56gWd2imLoNvMEGded9k4uvF99nikDjaf68hIGZzqGCtkCXnmO4gV/D9G99WNINun3IdP6+iYYQ9q5JQ4GuEuulYkT4n/XvyKWh1NBvVBdElRDVqhxEKyyAroYGI2cIDc7LpKxw/6nSD2RBLJSrXiRiBhHXGzAK6xG9FcykhKmlSadf7bo8XokHrQtbaw8oBlXqe93865WUlVbOstiPaRD8nf7D0IbecxAJEFEC4dG5OlknpwzfC/9yM9CSwoRCKEwU9YBZzsh6QslWru0x9Q4qElNrkvQv3pSPz5HmhBtqxrfvJbx0LZnRDQoJ2XjZbNoYpxVbGpkf0J2xe6sZAIvKJexG3Z6C3bwCGwMioZWJxmX5RtSE6dwWBQ7fYW4GDLonsJSzs7npLXlyF3X9ywyNexDYohKeIDssabwZ4QT9qZVSaCBgtwOulwVgK6DsTM+w04aAzSxDVcUdXNSgb6nDIMC86lK08ms38tlMp8GsvhfpCkoDHNn6xjWM9OPIpxVq1x/s4I++PYdejRYBddu5EwXbRxBQthcsGsoLuoUZlm8ggSWbFgDmNGPpdrnazbgHYduUPxUQrFYa7i78Ih86yyVwmLcgMcom2zJ2jwwIZO6oY+PKk/8+ThyMQRMsEuXJ7eTCY9hLOxdA6agvQwXkw75M68/ABVgwPm+EphQ9VqJNkJNu1OsOA/IKD+kvr4ULY8PdkGuBYWhnV5RQRRQ6NH7K+sd9+mx0nTnl6mpVcWSeICG5dlc/Qu0ZRsjYMqaJWomSdTKlnB8LsnEDWvGrEry8MRNp3mCE0Epcyog6NcXkeK1VFaShzABQKgwQhCTf6LJrnPCfJLo6x/82ZE6zI6Z/a8wZcHBgm0MMVKNiaMrpch+uTI3924eJhUURM58/dlSnYdQAyBRJ1XiHQZkusy9bAwpx8USKSa7GrQhHbBBBwyG0Gh8jKx3VzRX2zCBVHUxwRboHS2gbAivoU/ftt6EX9zI+HKsQFX4k2taQ69XFnGmfR0xTwxSFi4dxnNlVuNIUlOPy769CnmSuJiuluMolq4b9SNRnNDD52QxBsvt3VIaNWgLbqQQM8ePziSgrNakcxtA4WOKl9P0L+0ED8k0Jts2V9mTkDvSe9S5UTavRWGabp+nUdfjfQJcAVMSTTqeQsUiEvuKo6swrVGPRa0nZfT1EpN8NmbJpkakXNvJOnmAR2mDTRwJsB7AGFwVkKtAFbRShkE7WUqCc60mVQqPLEmMC67uD1a+pTX7u+EVwsEEcFCmGIm+ytNFLxWLPvVmlYrx452Q5qVbfOMelga80/9rc+sIx8T8NEwG+FQu9Jp4pJ1j7iB7Pp4nLAjtX/jBpm7efB0SIig/ER2qSJv+hvRXwhHtbLMoqRfAMRTpyMyj6LqsK6NAr6xIxvyeEM6WNs+nDUmlVvkEGEkF6kncG1kSgWViH3pwQYPwqoQr+hW61AouQf60yUDBVLlvk3vT0Zk/EbAqOJMOTZgcyftYk0cP+XxkwJ2w9XptKSx/la0UyEX3RhUgloJyda+kFqijrFM5Niy/Rr2v8k6wtZ0WKe7/qpLib8Xndbvf+u2y/C+p/+xAAABhGlDQ1BJQ0MgcHJvZmlsZQAAeJx9kT1Iw0AcxV9TpUUqDmYQ6ZChOrUgKqKbVqEIFUKt0KqD+egXNGlIUlwcBdeCgx+LVQcXZ10dXAVB8APE1cVJ0UVK/F9SaBHjwXE/3t173L0DuGZV0ayeMUDTbTOTSgq5/KoQekUYUfCIY0ZSLGNOFNPwHV/3CLD1LsGy/M/9OfrVgqUAAYF4VjFMm3iDeGrTNhjvE/NKWVKJz4njJl2Q+JHpssdvjEsucyyTN7OZeWKeWCh1sdzFStnUiCeJY6qmUz6X81hlvMVYq9aV9j3ZCyMFfWWZ6TSjSGERSxAhQEYdFVRhI0GrToqFDO0nffzDrl8kl0yuChRyLKAGDZLrB/uD391axYlxLymSBHpfHOdjBAjtAq2G43wfO07rBAg+A1d6x19rAtOfpDc6WuwIGNgGLq47mrwHXO4AQ0+GZEquFKTJFYvA+xl9Ux4YvAX61rze2vs4fQCy1FX6Bjg4BEZLlL3u8+5wd2//nmn39wP57XLd+8ZLEQAAAAZiS0dEAP8A/wD/oL2nkwAAAAlwSFlzAAAOwwAADsMBx2+oZAAAAAd0SU1FB+cIHBQ3LSPd1ZEAAAWWSURBVFjDrVfdixxVFv+de2999XTPJNNtME4yE9BJCHlRTER3wRc3D/vqsyzs/gO7BFYQJB+u7Bp9UBSR4Iu+BR8EEQQfZBcE0UUTYYNmkujmY5PMjPPRPfU1XVX3nH2oqp6el9FUvHTX7a7uW+d3zvn9zrmXRAT3MqIwxIkTf/nYGP3g2nr/w/PnP/gH7mOYe13Q7nRw5+7dJy9dutybmdl7Dfc5fhGAl186+dYPP9747YG5mTOnzvz9ozhKMhCQ5zkBwL8++3Ri19SuYZEP+ehTT/Pzfz0x3W538pOnzoQ/92z1SwCkafrMrVs3H/vu+4XfXLr0HwoCPxMWTE1NJgDw1b+/Pv/m2+9EFy588+jnn//TFear/fX1ldfOvvz7XyUCU1NTXxZFfjiMoqNnTp961w+8A67rIEnS5/70xz98O9npHI7j2F1dHzzxzdcXzGAwmNbG4fV+f/hzz6adSPi3l148snh38YTnt55duHx5l2WG67rQWiOOY2RZDgEAAYqiQK+7CzP7Zy+mcfLYdLcrcwf2n/zf7aV3Xz376lIzAKdf+MJafmpxeQUiAhFGkiSwLGAWEIDvF67hkYcPwHMdbA6HyPMCPy3/hMOHj2BldQlpmhWPHz126Owrr/x4zykwxuXCpgCkAiAAKTDniOMERhtoraG1hjEGbWMgIoiiBFeuXoXneyDArK2udgHcO4DC5v2bt25jc3MIrTV83wcABL4PAsF1HRijQWUWAJFyhgAEAAQWxtLykmpEwjwvZLARIo5T3LxxCw/s2QPPc7C8vIyH9u6F0gqO1lXocyRpCt/3MRhsIAgCEAEiwOLikm0kw8D3EwUCM4OFQQRYtugPNrA5HGJzc4j/Xr+OOE6wsrqGywvXEEYxwjAEqFyXZzm6vS41AjDMhqHS5V+01iBFMNqArQWBSl6UXAYqb4WrO0SwlgEC5ucPNqsDwgKlNECENEmhKqPMdY63hqMNXMeB1ho1DZRSUEQQ5rBRBCyzAAKCIC+K0kuuZVuCgRCk+j3LM1i2AJURUYpARIjjxDaKgNI6IyIIA8wMotIYC6MifR398jOokkPlgLX1uxkJCUiVUmBh1PVKRKr8cy2+seuIESAQ8rwoO2h7QhpFwFqbEBGYbUUyGSNe6TVVtrcX1DJSWhuoMm3cjAOFLcbryqga1jME49fqNVKBMQpEwJ07t/NGAPxWIIoUQASpWF33DpGt6lcCGvs+lggBoTM52Ww/4DjuEFR6Uz6vYj4INKq/VNmUbaV4tASCXm9PMxIO+v0+VblXSm03oNSWozUn6gQQjWYRwHHdZgCybEhECoW1cIwBM29jm0iddxmTYakSIhrJ9vjx3zXjQGdyKiMQbFHA83xYa6t00HaPZUuMPMYRqjrisWPHokYANtN0AAiYGcZosOURw8c3Msx2xAMRrpNfRgKCa1cWmqXAWlsQ1d1QRg2HQBDmbVWvjoRUOyVVsZCUwsy+fc1UEAQtISJopWALCyIFZgulVdmQqgJRE3XEC9BIkkZr7HT22ZmEeZ4BQKsVIAg8eJ6LwtZAGMwy6o4iZY9g5i1ugDDRbqPTaTdrx1qpIgg87J7eDWUMjDZoBQHa7dZWWR4D0GlPQCnCxERrxBPfD9BpNwRQFMUGkUIraKE73fvEWnsky7PpublZiuO4lWWZKo2WUrW2KOWHLZUUeTZofDCZ7vWuLC3e/UhpdTyKoyd8P2g5xlHGccJutxevra2BupS3gmAlL4rJMAzdKAr3hVFS7iIEsNZ+1/hgsiUz4NTpF2dv3rgxr7U+OMyygxCZL4r8EEHNGcesDNPN3V7gr25sDGbCOAVA8D3vh9n9+58+d+7cnfsCsNO4ePGief/99x6JouhgFEeHtFLz/Y3wQdfxZG5u9s9vvP769Z3W/x+NojQvpvBOhQAAAABJRU5ErkJggg==",
"template": {
"name": "CUSTOM_ICON",
"service": "CloudRF https://api.cloudrf.com",
"created_at": "2023-09-05T20:40:56+00:00"
},
"site": "Site",
"network": "DTC",
"engine": 1,
...