
Monday 8th July 2024
Following our most recent field testing, we have identified two significant improvements in accuracy:
The first is a new deterministic propagation model; the General Purpose model. This is a frequency agnostic curve which takes its accuracy from high quality reference data. It’s dependency on high resolution clutter sets it apart from legacy cellular models which are more complex empirical curves designed in an era of basic digital models.
The second improvement is better default clutter values which align with ITU-R P.833 recommendations, as opposed to our current light clutter values which have been retro-fitted to tune the ITM model, also designed before clutter data was widely available.
Dense clutter
When input settings are adjusted to match field measurements, the model and clutter parameters are adjusted to achieve the best match, measured by the error where a low score eg. 3dB is best. Previously, the calibration adjustments were weighted towards the model with clutter accounting for a relatively minor change.
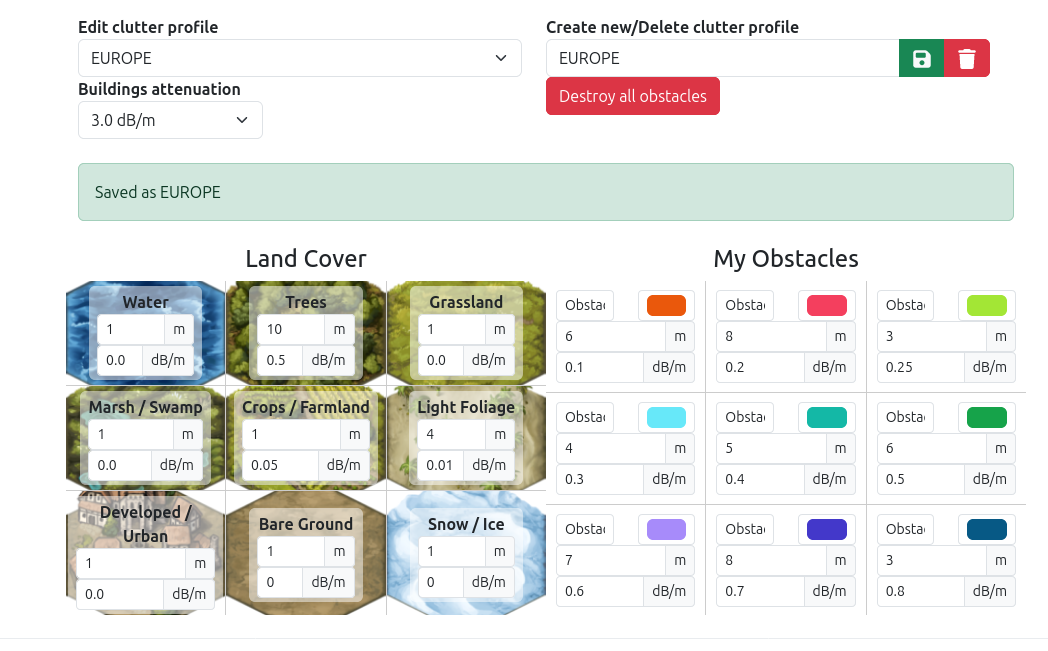
With our new dense clutter values, we have referenced the ITU-R P.833 recommendation for vegetation values and other papers for buildings. As a result we have new, dense, clutter profiles which when combined with improved diffraction will improve accuracy.
These templates are optimised for 1GHz. Actual attenuation will vary by wavelength so you are advised to create your own if using a very short wavelength with adjusted attenuation.
CITY
Buildings are very dense (3.0dB/m), with variable heights and trees are short (8m) and light (0.4dB/m)
SUBURB
Buildings are dense (2.0dB/m), with variable heights and trees are taller (10m) and denser (0.5dB/m)
FOREST
Buildings are light (1.0dB/m), with variable heights and trees are tall (12m) and dense (0.6dB/m)
ITM model warning
There is one exception to this which is the ITM model: This is our oldest and most complex model which (uniquely) includes its own Vogler diffraction routine. The new dense clutter will not work with the ITM model which can only be used without clutter or a very light profile such as Minimal.clt.
The following table lists changes to combinations of models and clutter:
| Model | Clutter | Comment |
| ITM | Minimal / Temperate / Urban | No change to coverage |
| ITM | CITY / SUBURB / FOREST | WARNING: Coverage will be very conservative. Do not use ITM with these profiles. |
| Others | Minimal / Temperate / Urban | Coverage will be optimistic where clutter is present |
| Others | CITY / SUBURB / FOREST | Coverage accuracy will be improved where clutter is present |
| All | NONE | No change to coverage |
Release schedule
The updated engines and matching clutter profiles are scheduled to be published on CloudRF on Friday the 12th July 2024.
