We’ve been busy as always improving our service. Here’s a visual roundup of updates we’ve pushed recently for API version 2.9 and UI version 2.8, current as of the 13th June 2022.
For the latest updates click the versions in the corner of the interface.
New features
Variable building heights
Our global building data has had a lot of attention recently from 5G operators and (counter) drone companies.
Previously you could use a mixture of sources to define a building from manipulating your clutter profile values to adding your own as GeoJSON or KML. Our third party buildings which we offer as an enrichment option in the Landcover menu were lacking height data so we used a user defined value from the clutter profiles. For many users on default settings, this resulted in buildings at 6m height, adequate for a suburb with similar architecture but no use for a vertical city like Chicago.
Our building data now has unique heights and we’ve modified our clutter system to match it. Our SLEIPNIR engine could already handle user defined height data due to previous modifications around custom clutter.
In the CloudRF UI, you can define the 9 system codes and only 9 custom codes.
Customers with private servers can define up to 255 clutter codes in clutter files on their system.

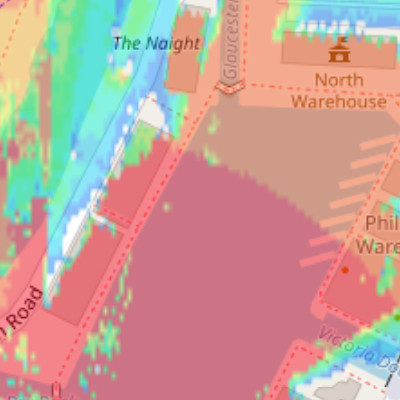
Diffraction for 3D clutter
Previously we modelled single knife edge diffraction only for the surface model, and considered through building attenuation for the clutter but now we can do it for clutter.
In the screenshot below, the COST model is used with 3D clutter for a suburb with a treeline along a train track. Both the buildings and trees are displaying diffraction, recognised by a shadow beyond an obstacle which gradually comes back into coverage as the obstacle angle decreases.
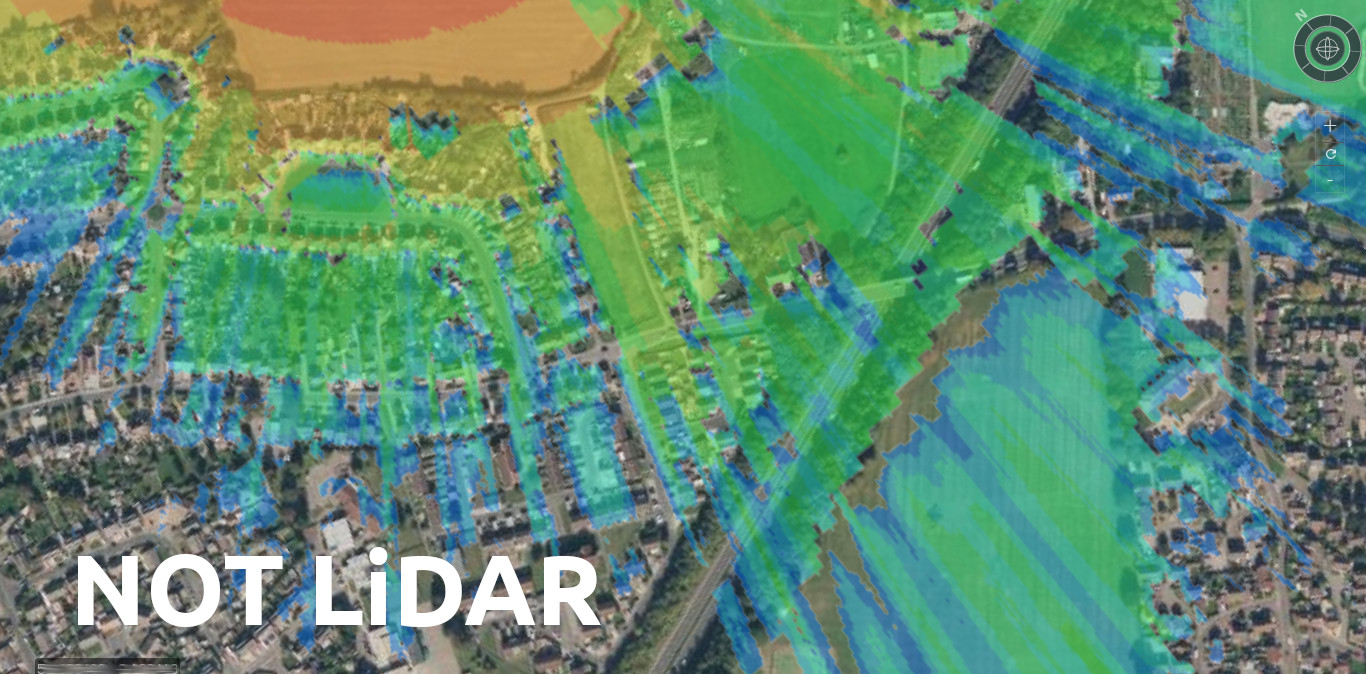
DTM option instead of LiDAR
We’ve worked with LiDAR in modelling for years and its great but has its limitations, especially with non line of sight communications where LiDAR will show a strong signal for the roof of a building and produce a very conservative “shadow” immediately behind an obstacle until knife edge diffraction kicks in.
Being conservative in RF planning isn’t a bad thing but with proper building height data we can enable more accurate through-building attenuation in cities, worldwide.
Nothing beats LiDAR for LOS analysis so we’ll still consider requests for uploading public LiDAR but for most of the world where there isn’t LiDAR, we now have an improved solution.
For rooftop planning, we recommend LiDAR but for through building/tree modelling at ground level use calibrated clutter instead. You can enable this option in the Clutter menu.
You can access this mode in the interface “Clutter” menu or in the JSON API with {clm: 2} in the environment object.

Delete-all custom clutter
API users can now delete all their custom clutter by requesting to delete id=0. This will soon be added to the UI with a button.
Added my-metrics endpoint for API usage
We’re now logging metrics for all the analytics APIs which count against your API use. We have an API to generate charts and will soon add client side charts so you can see how your API use breaks down by tool and time.
Automated testing
Testing is a critical part of maintaining our quality of service which is becoming increasingly complex. We’ve added automated workflows to our development environment to help catch bugs earlier and complement the manual interface testing.
This is implemented for the API and UI repositories at the code function level as well as our regular regression testing at the API level and now third party automated exception handling.
Improvements
Conditional terrain smoothing
We’re smoothing terrain for those super sampled locations. For example if you went to Africa which is mostly 30m DTM, and requested a 2m plot, we would be super-sampling the DTM by a factor of 15 which used to result in ugly artefacts on hillsides. We’ve fixed that and are able to have smooth hills and precision 2m clutter in remote areas 🙂
Up to 255 clutter codes
In the CloudRF UI, you can define the 9 system codes and only 9 custom codes but the backend system supports up to 255 unique classes of clutter. You set the height and density for each so this could be skyscrapers for a city or crops.
Customers with private servers can define up to 255 clutter codes in clutter files on their system.
Diffraction loss adjusted down by 3dB
Following feedback from Mountain rescue teams using our service who were surprised to find coverage in modelled dead spots, we investigated our diffraction model and found it was too conservative by at least 5dB. We’ve adjusted the loss it applies down by 3dB so it’s now more optimistic, but still cautiously conservative.
Extended southern limit to -89N
You can model on Antarctica now. We don’t have DTM there so it’s flat as far as our service is concerned but if you are using the Satellite tool, this now works on the continent for testing for the horizon on a route etc.
Fixes
- Replaced source for 3D buildings from a commercial supplier to Openstreetmap.org
- Points requests was failing to handle some responses from the engine
- Returning correct HTTP status codes for errors now
- Template list is returned as JSON in the UI
- Template authentication has been upgraded to the header “key”
- Credits balance was reported incorrectly for some API calls
- Remote tile fetching was corrupting some local tiles
- Sanity check unworkable paths before passing into engine (eg. 1m or 1000km)
- Some JSON responses malformed
- Splicing of points near the Rx in a points request works better for a figure of 8 route.
- Preferences was breaking if no lat or lon set
- Performance improvements to “sea tiles” used for offshore planning.
- Changed noise floor validation to -130 to -50dBm
- Fixed issue with some interference API calls missing id values
