Developments in containerised software and portable GPU hardware have enabled RF simulation at the network edge. Field testing has proven this powerful capability can serve multiple clients from a small battery for a sustained period of time.
Key findings
- Offline operation for over 6 hours
- Average 4W power consumption
- Fan draws most power over a day
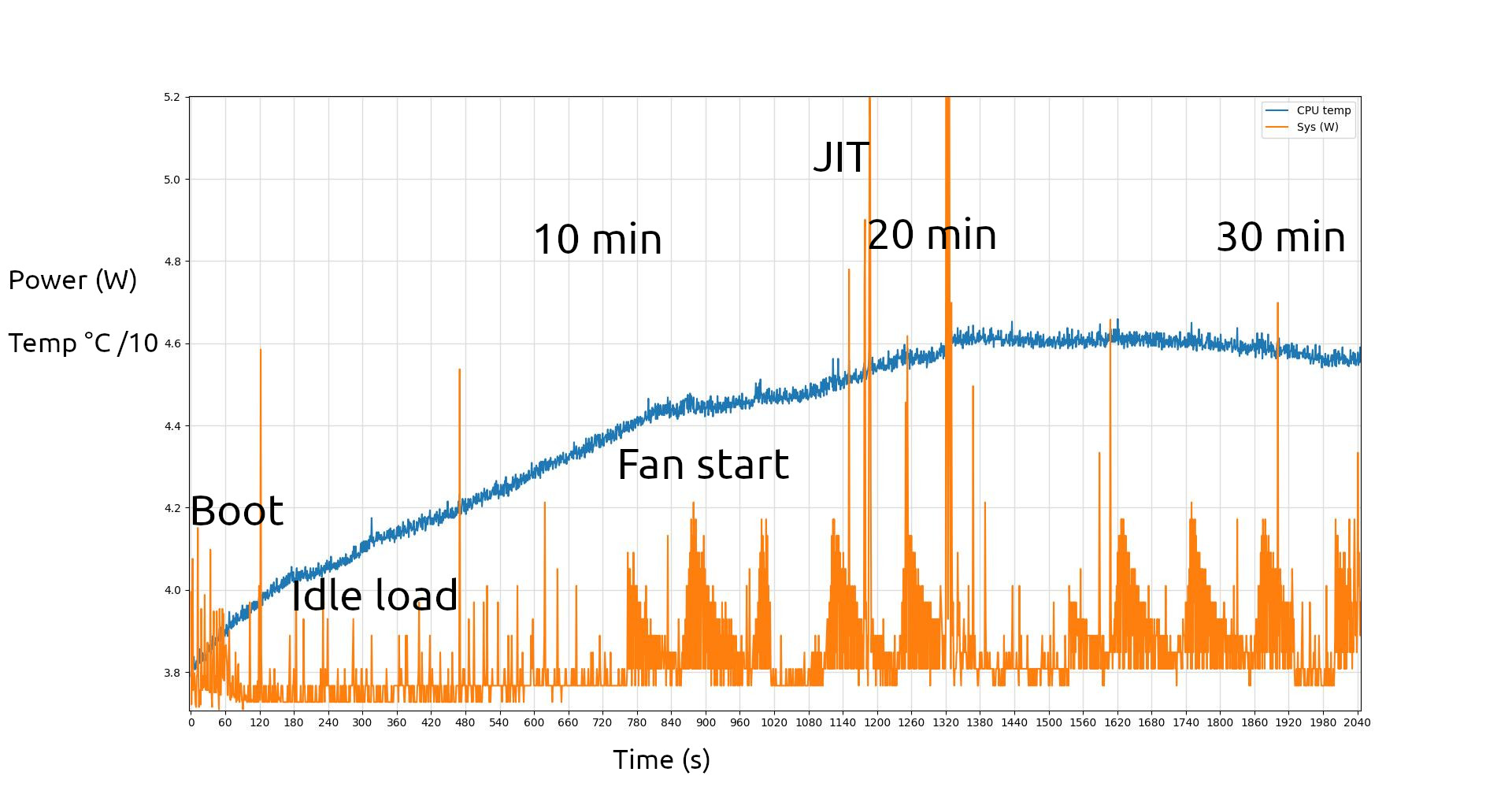
- Nvidia Jetson power profile recorded
- Phones are tricky to operate with gloves
Test setup
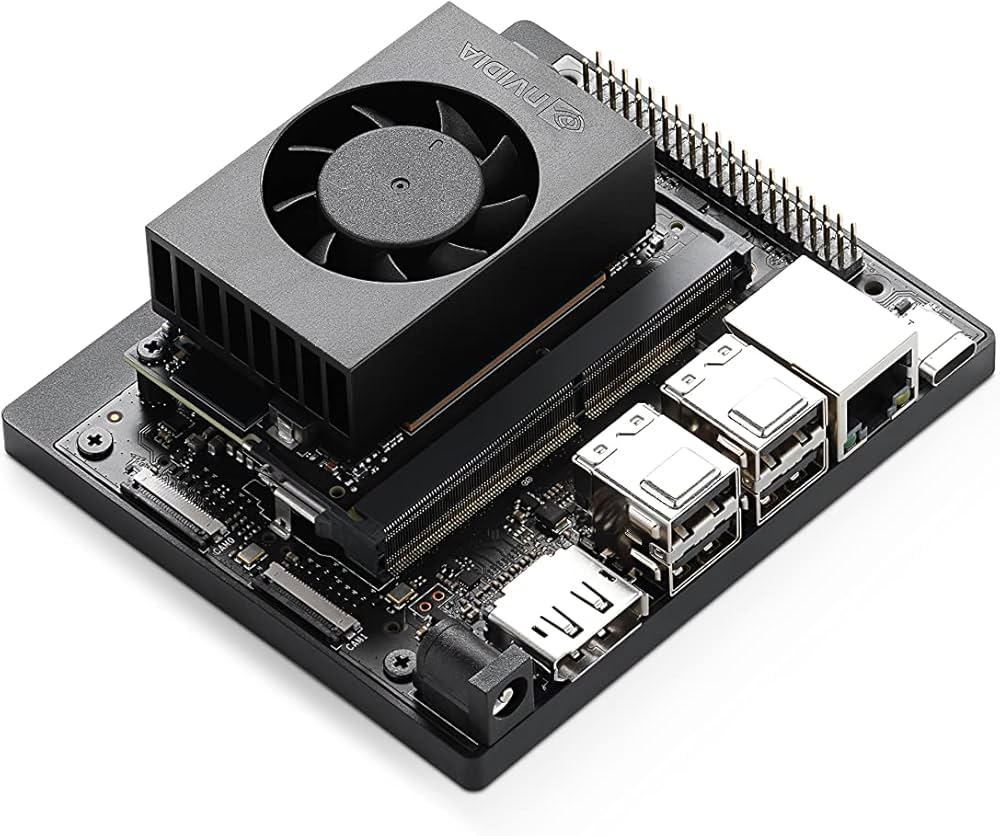
An Nvidia Jetson Orin nano 8GB processor was paired with a 10AH 12v battery in a portable case.
This was assembled and demonstrated earlier in January with this video.
The following software and services were installed to provide a representative stack:
- TAK server 5.3 with PostgreSQL 15.11
- Hostapd for a WiFi AP service
- DNSmasq for a DHCP service
- SOOTHSAYER 1.8
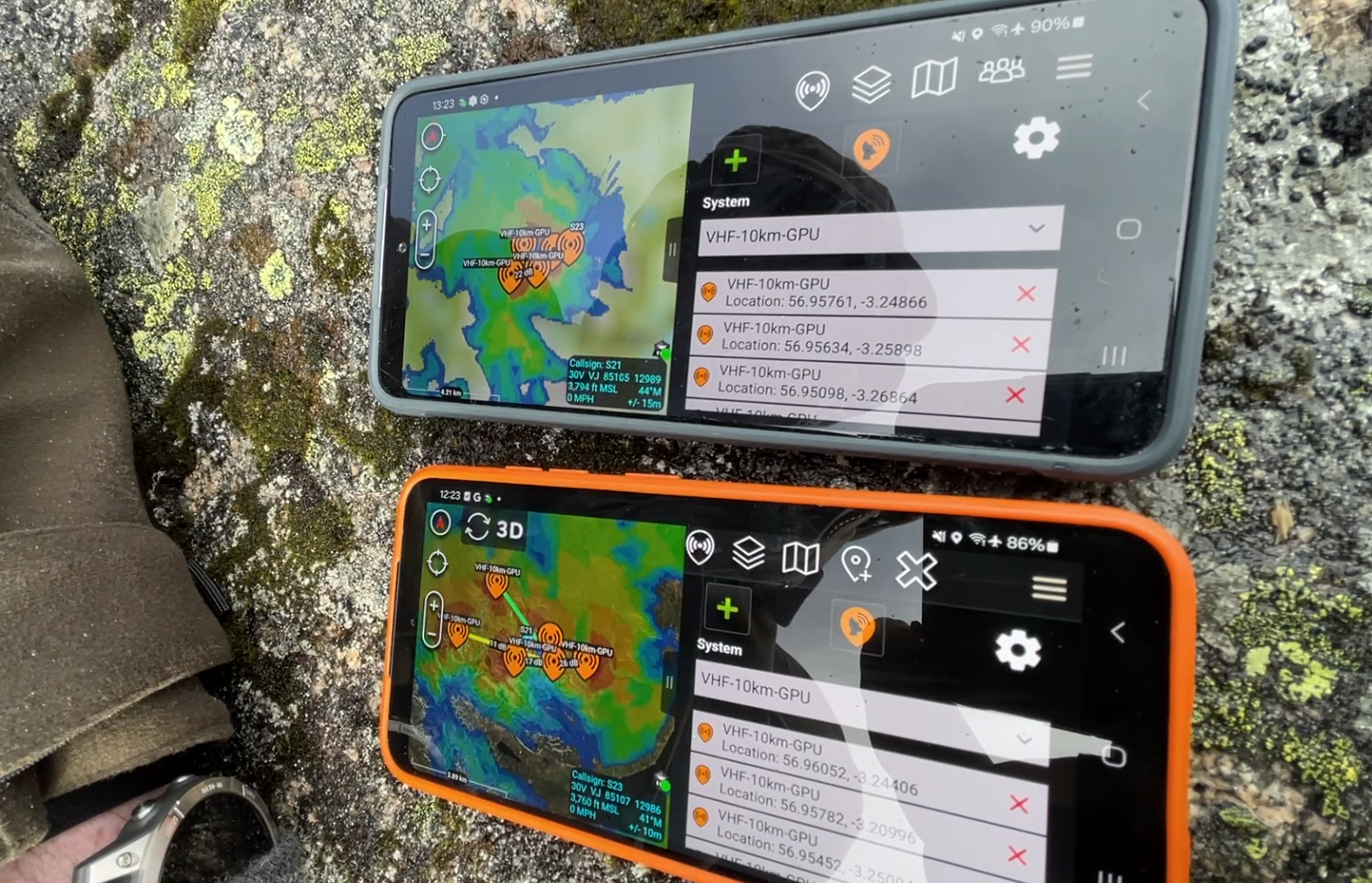
Instrumentation was performed using the onboard tegrastats utility every second. This provided load data at a 1Hz refresh rate throughout the test. Two ATAK end user devices (Samsung S21 and S23) were associated with the WiFi AP and SOOTHSAYER server via the open source soothsayer plugin with distinct accounts for parallel processing.
Each phone was associated with the TAK server using TLS authentication. This served no purpose other than to show us a green light in the corner of the phone to prove IP connectivity which would be needed to use the (IP) plugin.
The last time we went field testing up a mountain we struggled with sound and wind so bought a lapel microphone so we could provide a detailed narrative whilst on a windy summit. This detail helped immensely with post analysis as we were able to identify details from the video which weren’t noted at the time.
Test results
A rugged 20km Scottish mountain route was selected over a period of 6 hours on a relatively mild day with still air temperatures in single digits celsius. Tests were performed periodically after long intervals to simulate real use with increasing difficulty: The first test being a single area calculation at 1MP resolution.
This was followed by a 4MP calculation which was later followed by a intensive stress test with two clients performing concurrent multi-site calculations. A multi-site calculation simulates several sites in a single API call and requires a GPU.
A final test was concluded at the car park where we were pleased to discover 2 of the 4 LEDs were lit on the battery. This video contains more detail of our hardware craftsmanship than we chose to share and is available upon request.
System startup
The server was prepared en-route and required it’s clock to be set manually since it had no internet access. This clock setting was necessary for both test results and SOOTHSAYER’s rate limiting which uses time stamps to ensure each user is waiting at least one second between API calls. Unlike the public system, SOOTHSAYER has no upper API limit.
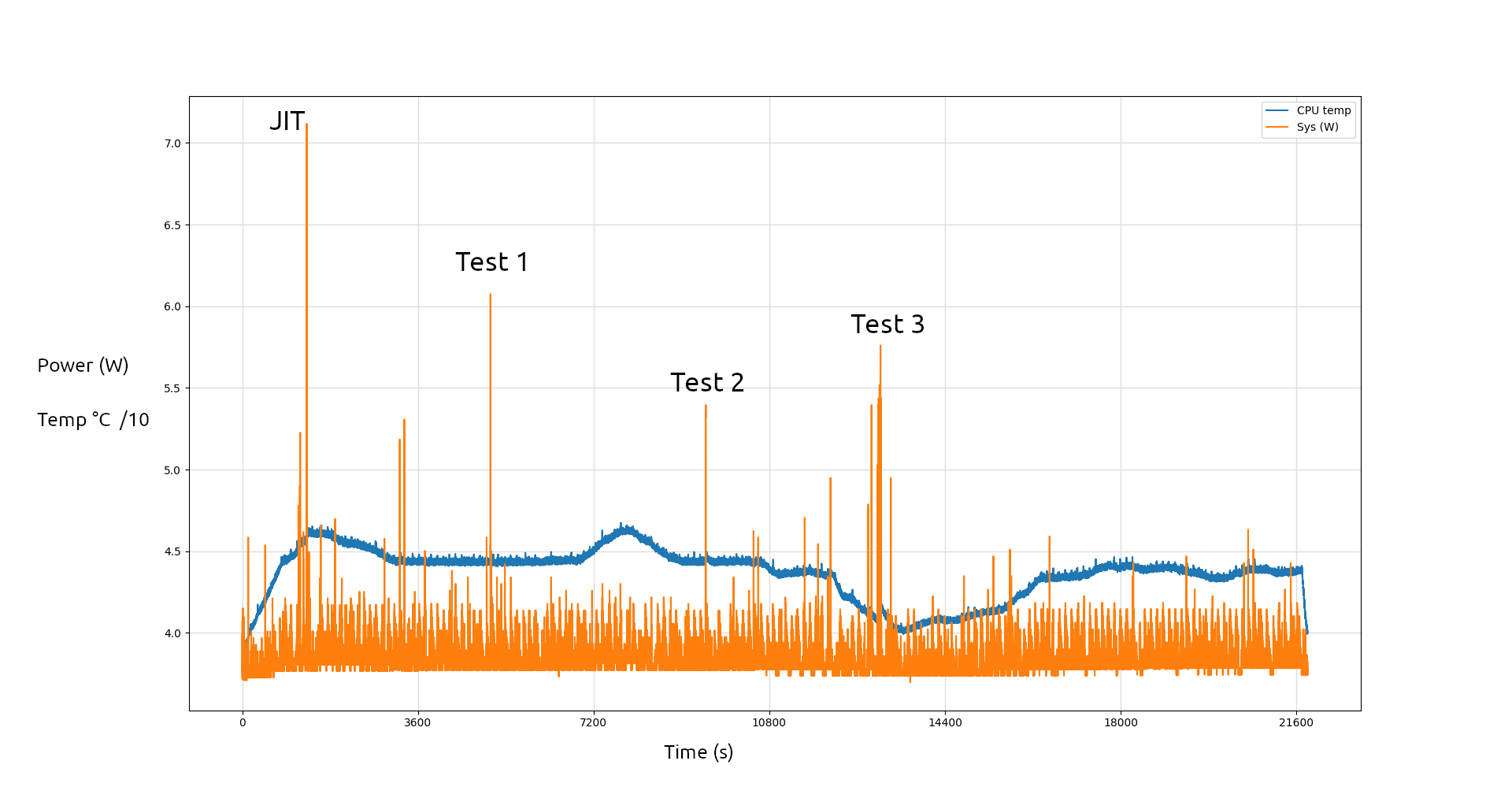
The OS was ready after a minute and the software services ready after approximately another minute. The first, and largest (7W) power spike in the data was the first test from the plugin prior to departure at the car park. This was assessed to be larger than others due to Just In Time (JIT) compilation of the GPU kernel. The SOOTHSAYER GPU engine is noticeably slower for the first calculation for this reason, which is expected behaviour.
Test 1 – VHF handheld, 1 million pixels
This test was conducted an hour after startup whilst walking along. The template used was a VHF handheld radio with 10km radius and 20m resolution for a total of 1 million points. As you can see from the video it concluded quickly.
Test 2 – VHF repeater, 4 million pixels
This test was conducted after 2.5 hours after climbing up to the snowline. A VHF repeater template with 20km radius and 20m resolution was used for a 4 million point calculation. This was noticeably slower than the previous test due to the increased computation required.
Test 3 – Multi client stress test
This test was conducted on a cold summit after 3.5 hours of operation. This time, two clients were used to stress test the server with concurrent requests. The requests were more complex multi site API calls which models an entire network versus a single site. As well as GPU heatmaps, the CPU was employed to create links between the radios. Due to the steep topography and random test locations, not many viable links were displayed.
Power consumption
The 1Hz data was collected with tegrastats and showed good power economy. The jetson fan kicks in around 43C and spins up then slows which is visible throughout the data as a saw tooth pattern.
The 3 degree temperate spike during the ascent at 2 hours occurred in a sheltered ravine. Our assessment is that the simple case was suitable for the winter conditions but would require a case with improved cooling for use elsewhere.
The notable temperate drop occurred on a mountain top during filming of test 3 when the box was exposed.
Summary
The test exceeded expectations on power economy and performance and showed that a (budget) portable battery could easily provide up to 12hrs of operation. At the end of our expedition there were 2 out of 4 LEDs still lit on our battery.
It validated the client-server design since the phone batteries were only slightly depleted throughout the test. Both phones finished with more than 75% battery capacity. Performing simulation on a phone is convenient but a poor choice for battery endurance especially and scalability due to the dependency on reference data such as LiDAR and antenna patterns which are provisioned on the server. Note that phone 2’s mapping was unprepared during test 3 but was able to render high resolution topography, sourced via the server.
Of note, the stability and power economy of both ATAK 5.2, TAK server 5.3 and our own plugin was good. We experienced no crashes or connection issues throughout the day which was welcome.
CPU calculations
In the first video, CPU tests were mentioned which we did plan to do. We tested CPU area calculations the day before and were pleased to find they can be almost as fast on a (6 core) Jetson for single sites which was a nice surprise. Compared with a GPU calculation, they use more power so are not as efficient. We did employ the CPU for link simulation on the mountain but elected to focus on the GPU compute capability and power economy.
Lapel Mic
We were stunned by the sound quality on the mountain as the wind was intense for test 3 and we were using an iPhone with a wireless lapel microphone. We recommend this microphone for field testing.
Look ahead
Applications for this network capability include Search and rescue, Mining, Agriculture, Government and Emergency services. Crucially, The edge concept challenges historic ways of working, whereby an expert with a powerful computer produces a plan which is later rendered obsolete by changing events.
With edge compute, planning becomes dynamic which is important since no plan survives contact with reality. Having the ability to redesign a communications plan locally reduces the planning cycle, saves bandwidth and improves spectrum awareness.
For autonomous systems, having integrated communications planning improves their chance of success and supports decision making beyond topographical route selection.
More information
SOOTHSAYER is a self hosted RF planning server with interfaces for different systems such as ATAK.
The software is available as containers for x86-64 and arm64 architectures and can be hosted in the cloud, on a laptop or an Nvidia Jetson. For more information see here or email sales@cloudrf.com
