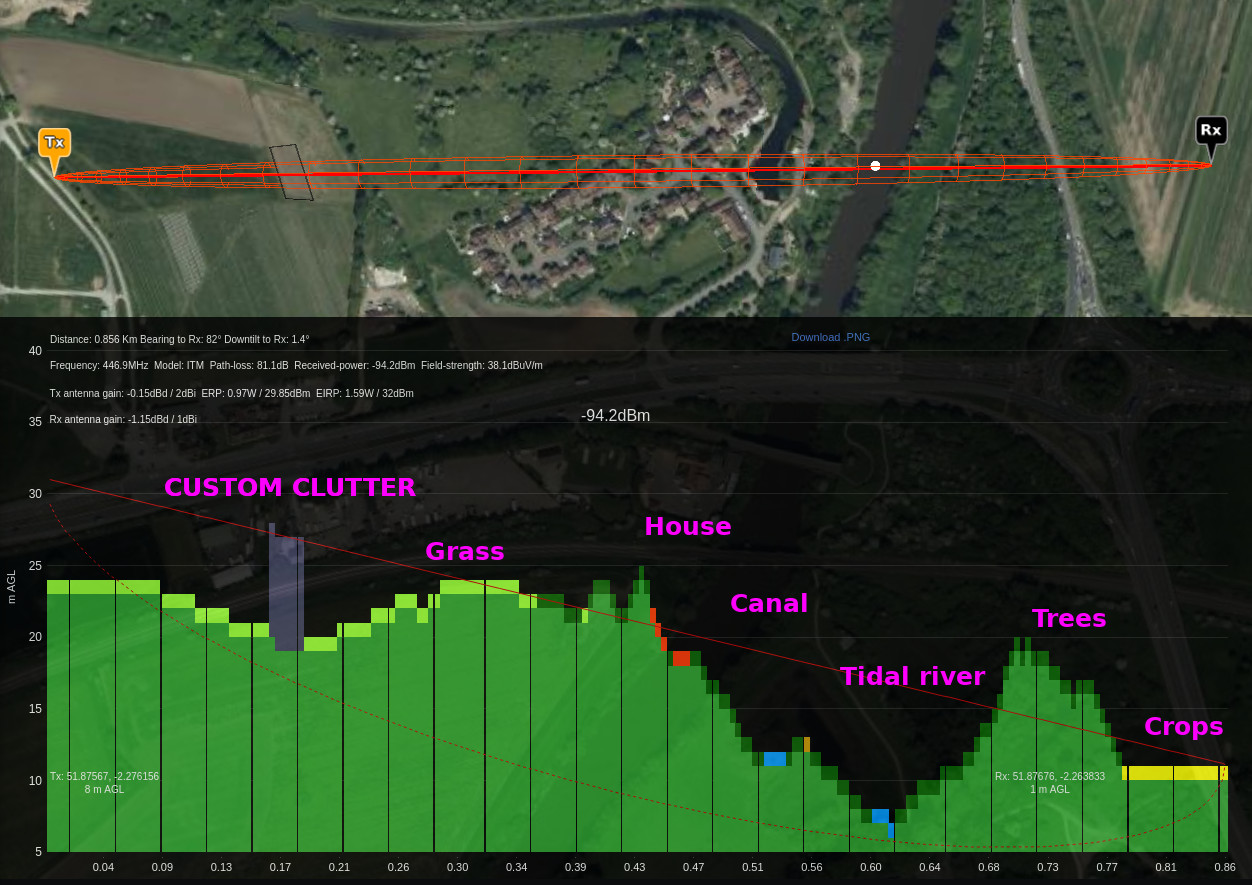
Clutter describes obstacles which will impede a signal’s path. For RF planning purposes this can be trees and buildings. As trees and buildings vary greatly in density we need different types.
Global clutter data for telecoms planning was extremely expensive, until October 2021 when the European Space Agency published it for free and we haven’t stopped laughing since..
Global 10m Land cover

The primary clutter source is European Space Agency (ESA) 10m Landcover data, published in October 2021.
WorldCover provides a new baseline global land cover product at 10 m resolution for 2020 based on Sentinel-1 and 2 data that was developed and validated in almost near-real time and at the same time maximizes the impact and uptake for the end users.
A tremendous step forward towards the joint use of Sentinel satellite data for worldwide land cover mapping.
© ESA WorldCover project 2020 / Contains modified Copernicus Sentinel data (2020) processed by ESA WorldCover consortium
This comprehensive dataset covers the planet and has 9 bands for Trees, Shrubland, Grassland, Crops, Built-up, Bare ground, Snow/Ice, Water, Swamps and Mangroves.
Read more about the 9 Land cover bands here in the documentation.
Custom clutter bands
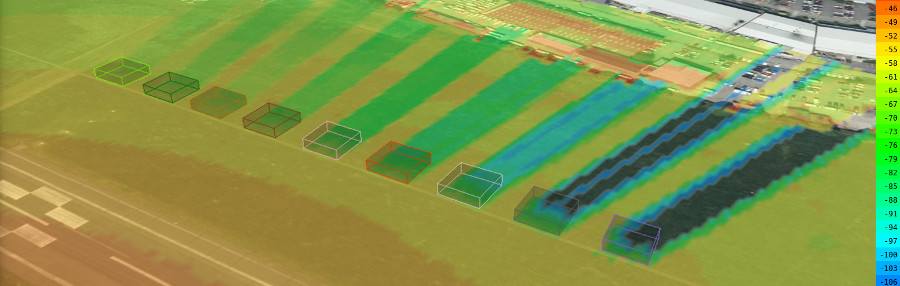
Cloud-RF has 9 custom clutter bands to improve the accuracy of your planning with attenuation levels aligned to ITU-R P.833-7 and options for manual override.
Whether you need to define one big building which is being planned for construction or need to upload a plan for a whole city we can support DIY and BYO clutter.
| Type | Name | Nominal attenuation dB/m |
| 1 | Trees – | 0.25 |
| 2 | Trees + | 0.5 |
| 3 | Timber – | 0.5 |
| 4 | Timber + | 0.75 |
| 5 | Brick – | 1.25 |
| 6 | Brick + | 1.5 |
| 7 | Concrete – | 2.5 |
| 8 | Concrete + | 4.0 |
| 9 | Metal | 6.0 |
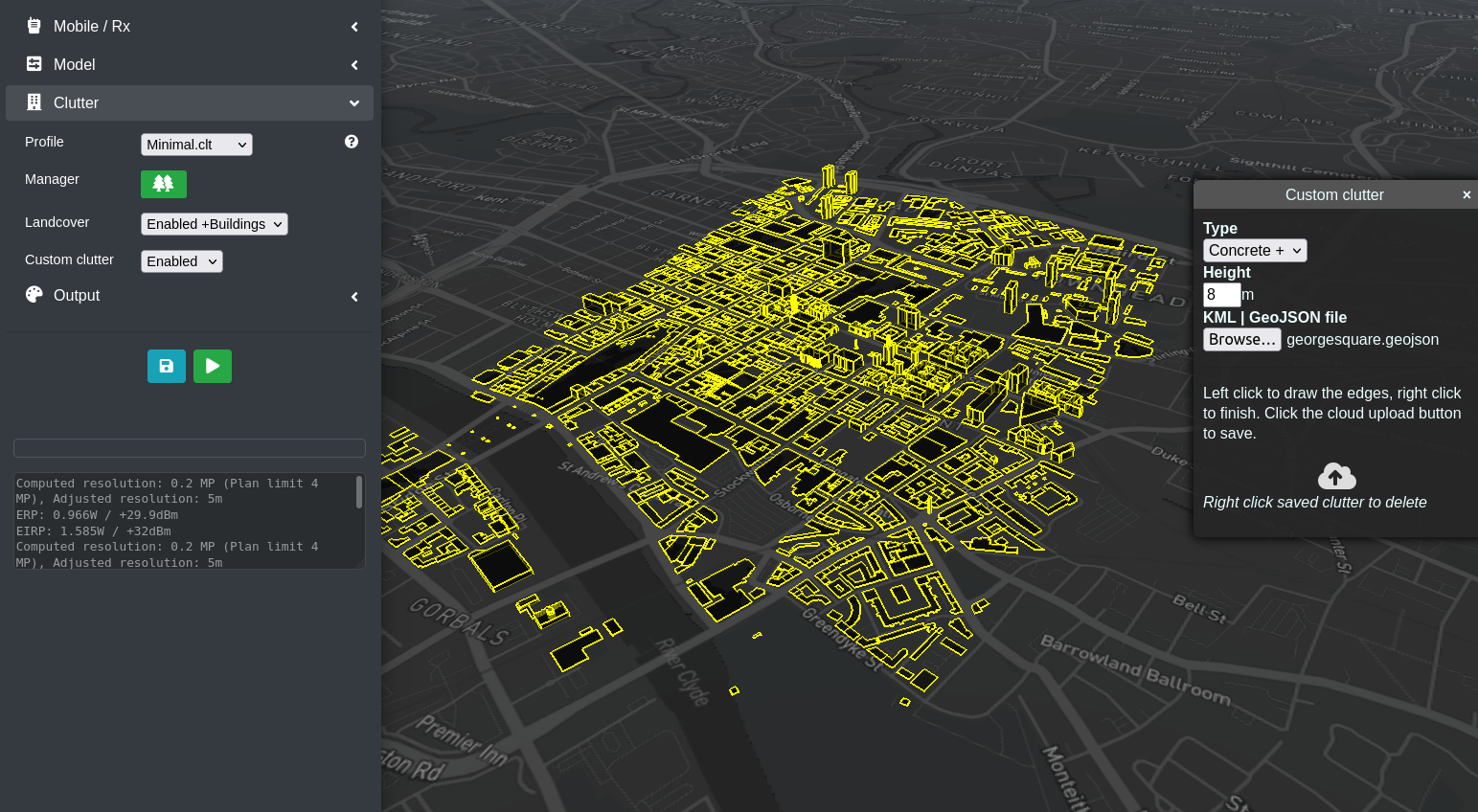
DIY clutter
Our interface has polyline and polygon tools to draw objects in 9 classes and up to 99m in height for a total combination of 891 possible clutter types. Left click to design, right click to finish then save to your account for use in the future via any interface.

BYO clutter
LiDAR
LiDAR data is the highest accuracy data available and is available for many cities at 2m resolution. Check the coverage map to see if you are covered. It’s a surface raster so is not permeable like the custom clutter but is very useful for line of sight analysis as even trees and bushes are represented.

